




Intro
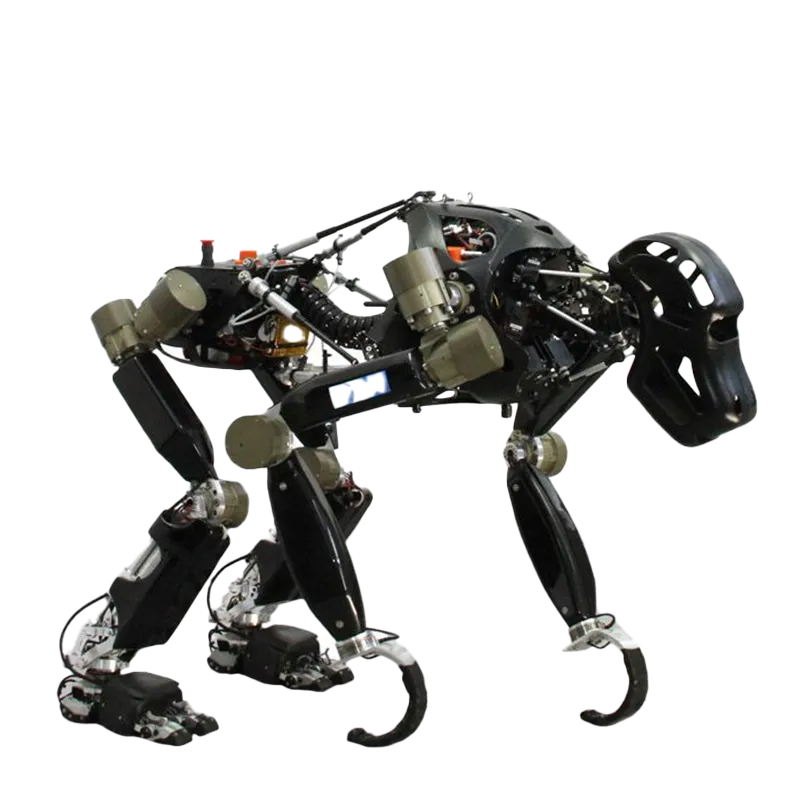
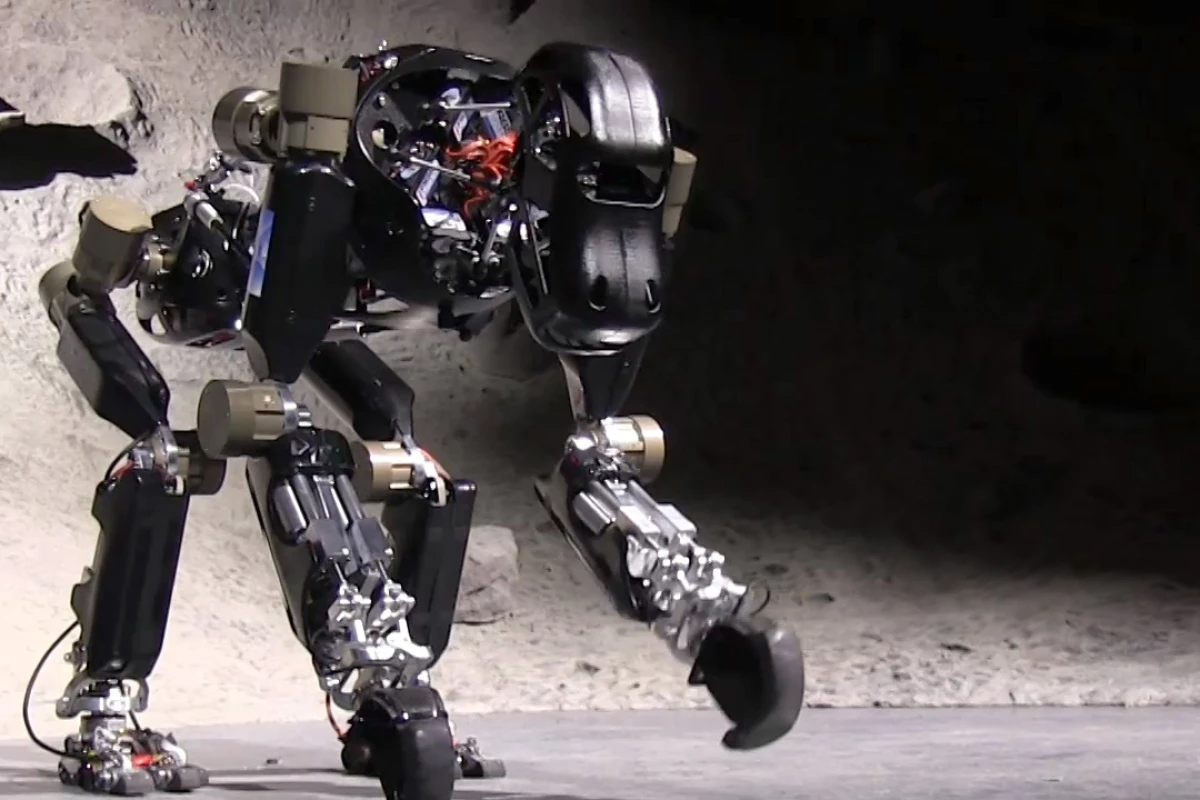
Charlie is a lightweight, hominid-style robot with a height of 75 cm in quadrupedal posture and 130 cm when standing upright. It weighs 21.5 kg including batteries and features an active artificial spine that bends in multiple directions to enhance mobility and balance. The robot’s feet are embedded with around 60 tactile sensors to precisely monitor ground contact forces, enabling it to adapt its gait to uneven terrain. Control electronics are housed in the upper body, while the power supply is located in the hip area. Charlie is powered by a 44.4 V, 2.4 Ah lithium polymer battery and actuated by multiple brushless DC motors distributed across limbs, spine, and head.