





Intro
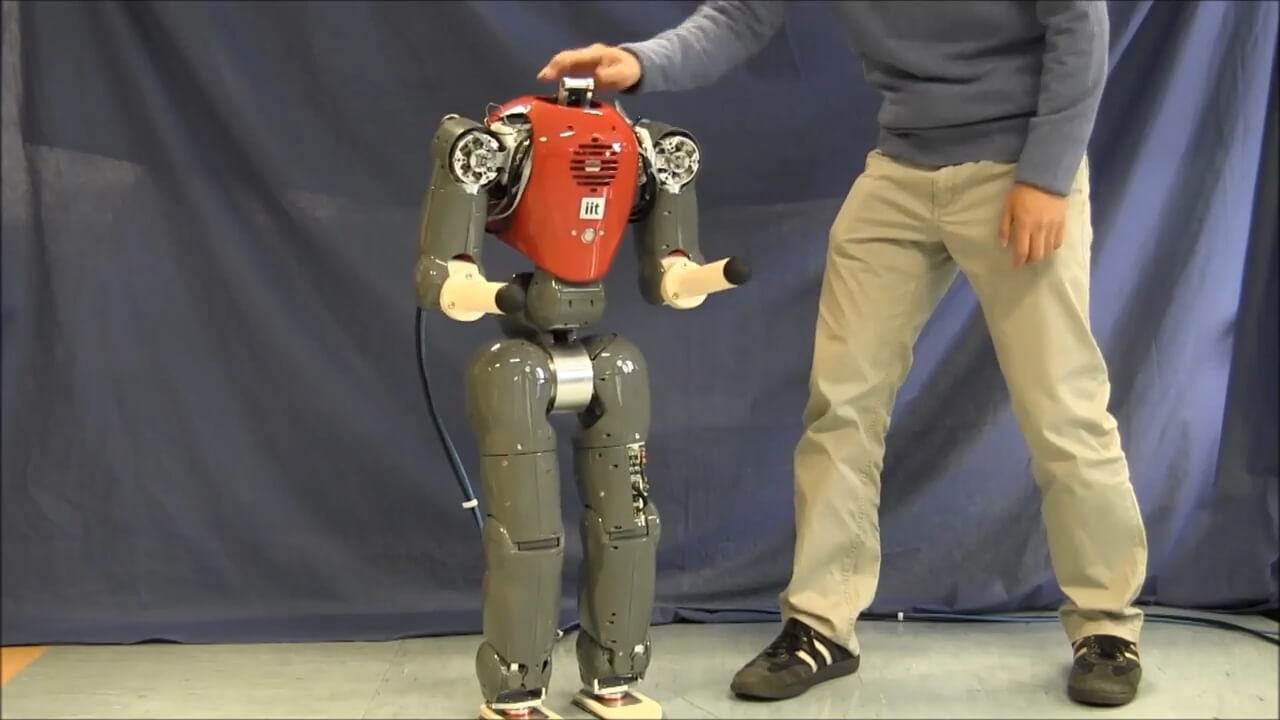
COMAN is a 95 cm tall, 33 kg humanoid robot with 31 degrees of freedom: 2 DOF neck, 7 DOF per arm, 3 DOF waist, and 6 DOF per leg. Its aluminum skeleton and titanium torso house over 30 torque-controlled brushless DC motors, with 14 actuators featuring series elastic elements for compliance. The robot includes force/torque sensors on ankles and wrists, and an IMU in the torso for balance and state estimation. It runs on two onboard PC/104 embedded computers with custom DSP joint controllers, operating under Linux with the Xenomai real-time framework. COMAN can stabilize itself on uneven terrain, handle pushes, and walk at speeds up to 2.5 km/h.