




Intro
The core strategic objective for Friday humanoid is to serve as a reliable, highly mobile, and human-safe platform capable of immediate integration into operational environments. The platform is intended to perform sophisticated industrial task with high efficiency. The design also places a high priority on operational continuity, exemplified by the inclusion of hot-swappable power systems to minimize downtime and maximize utilization rates in commercial settings. A secondary objective is to provide a high-fidelity research tool for the development of advanced algorithms in control, path planning, and AI.
Physically, Friday is built to the scale of a human worker, standing at 173 cm tall and weighing 115 kg without payload. Its main structural components are fabricated from aluminum, ensuring the necessary rigidity for actuation while managing overall mass. The platform is engineered for high throughput, boasting a fast internal traversal speed of up to 1.9 m/s, supported by a system designed for maximum operational uptime via hot-swappable power modules.
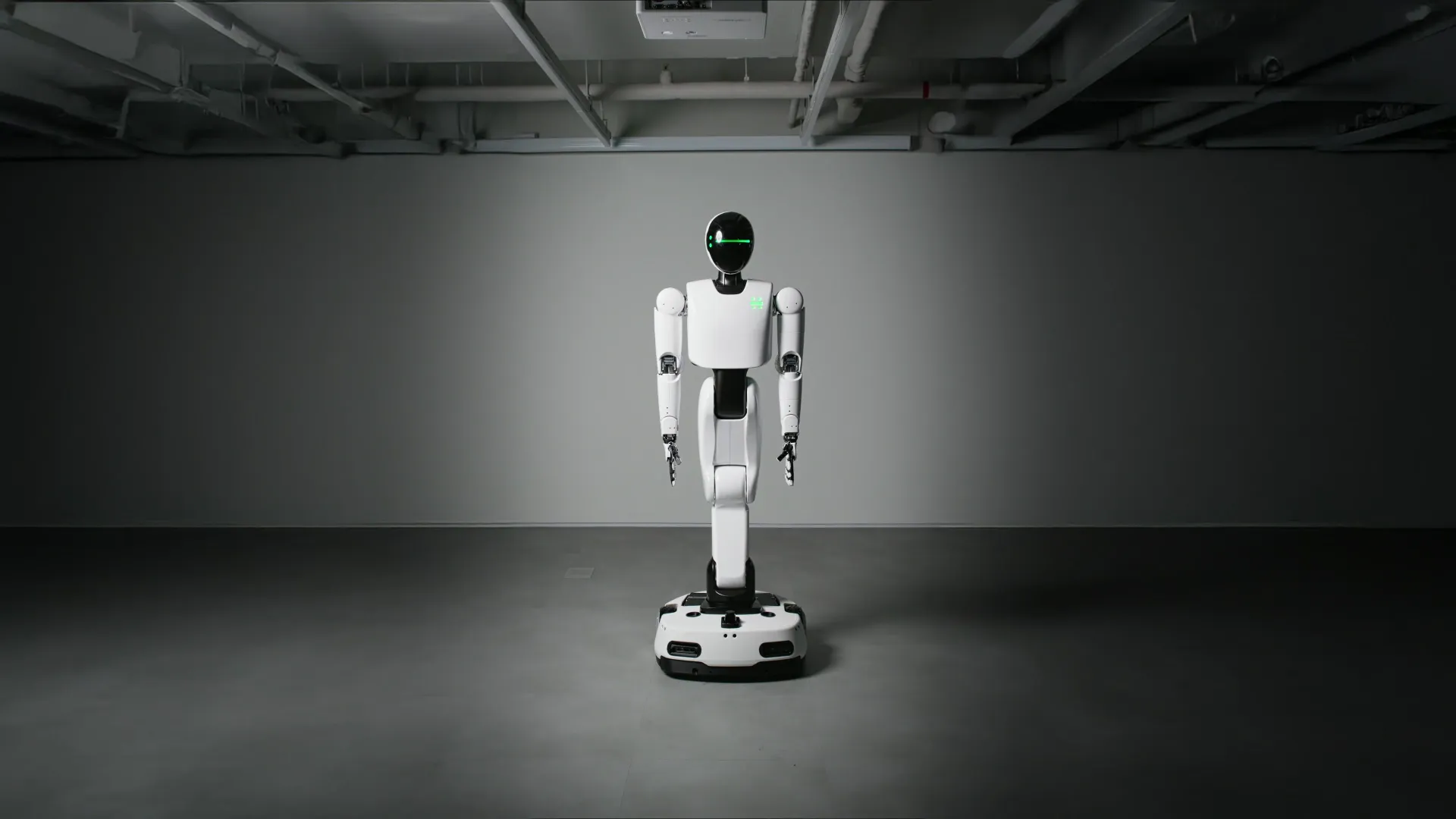
The strategic decision to utilize a fast wheeled base instead of conventional bipedal legs represents a core engineering and commercial calculation. Bipedal locomotion is inherently energy-intensive and often limits top speed, posing a significant operational bottleneck for throughput-driven applications. In contrast, environments targeted by Friday—manufacturing floors, warehouses, and logistics centers—are predominantly flat and structured. By selecting a wheeled chassis, Holiday Robotics successfully maximizes the robot’s traversal speed and drastically improves energy efficiency, enabling a sustained 4-hour runtime. This design approach confirms that the Friday platform deliberately prioritizes high-speed mobility and sustained operational efficiency over the universal but slower terrain adaptability of bipedal locomotion, thereby enhancing its commercial return on investment in its intended markets.