



Intro
The central objective of the Alpha Wheeled platform is to deliver a highly autonomous and reliable solution for industrial manipulation and mobility. Its development directly targets the gap between fixed-base industrial arms and fully mobile robots, allowing it to perform complex tasks requiring human-level dexterity while covering extensive distances efficiently. The successful Proofs of Concept (PoCs) with companies like Schaeffler (bin picking) and SAP/Martur Fompak (intelligent kitting) validate its core design goal: integrating advanced cognitive intelligence (VLM/VLA) into a mechanically robust platform capable of handling complex, real-world variability.
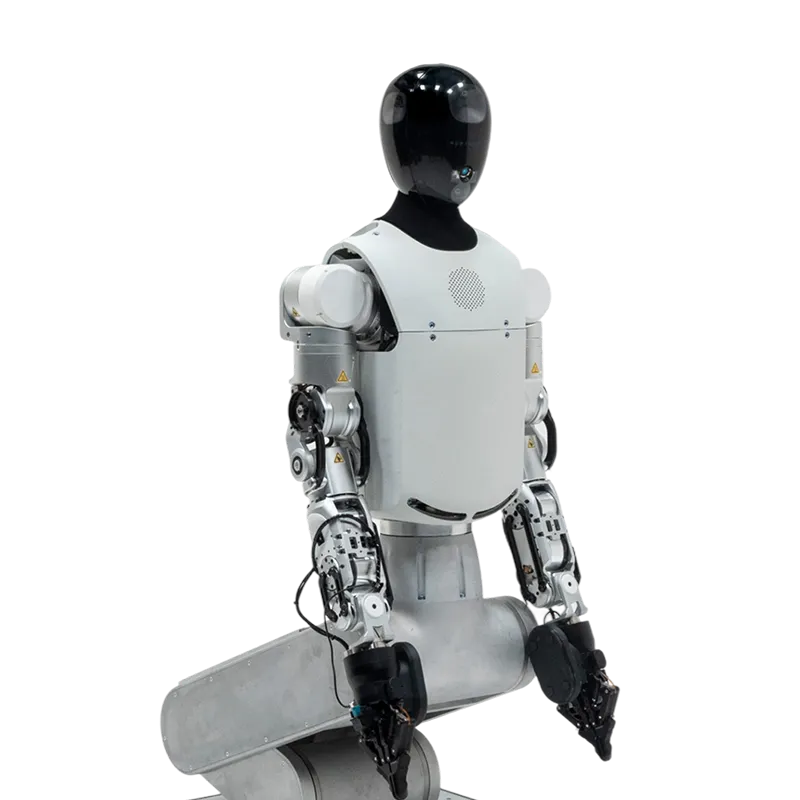
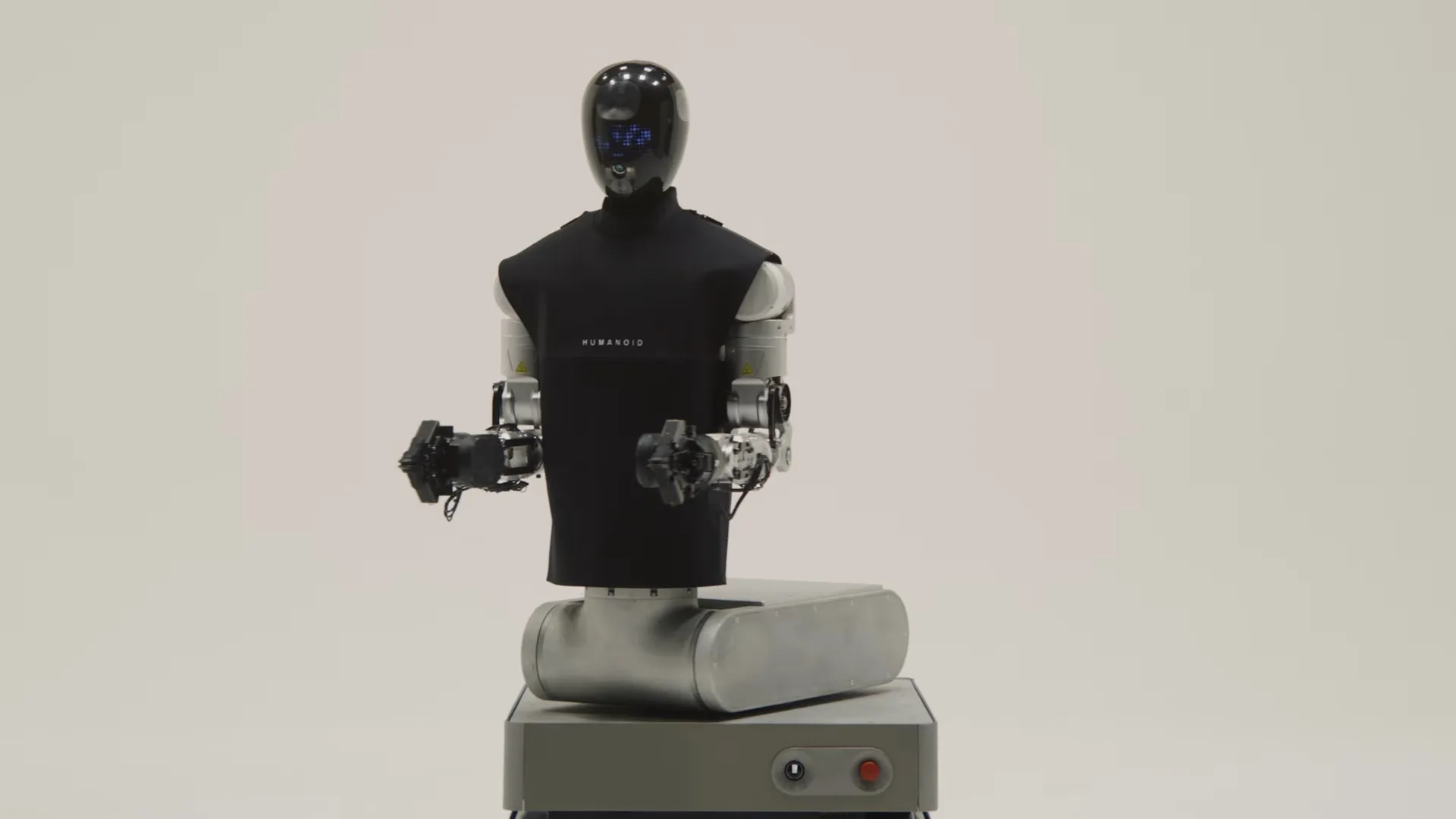
The physical design centers around robustness and scale. It features a full humanoid torso and arms mounted on a heavy-duty, omnidirectional wheeled mobile base, which provides exceptional stability necessary for dynamic manipulation while moving at high speeds.
- Height and Mass:
The robot stands at 220 cm, ensuring it can reach and interact with industrial shelving, control panels, and machinery designed for human operators. Its weight of 300 kg (661 lbs) provides a highly stable platform, which is critical for maintaining precision during high-speed travel (2 m/s) and when handling its maximum payload. - End-Effectors:
Modularity is a key feature. The robot supports interchangeable end-effectors, including a highly advanced 12-DOF 5-finger hand for intricate, delicate tasks, or a simpler, faster 1-DOF parallel gripper with a pad for robust, repetitive handling. - Environmental Preparedness:
The inclusion of interchangeable garments for protection and safety suggests that the robot is prepared for environments with potential hazards, debris, or contaminants typically found on a factory floor.