




Intro
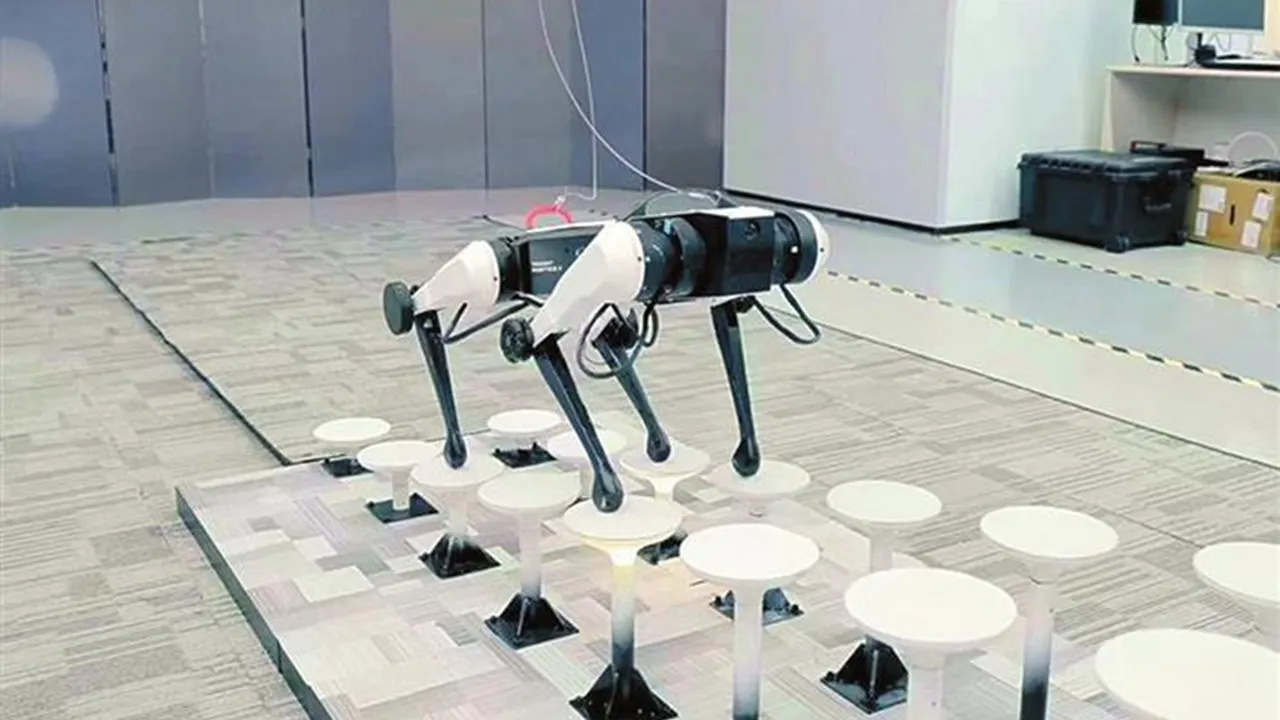
MAX is a compact (14 kg) quadruped robot featuring 3 actuators per leg (total 12 DOF), integrating wheels within the leg joints to enable mode switching between walking and rolling. Its real-time visual and terrain perception use on-board cameras and sensors enabling mapping and obstacle detection with high accuracy. The frame and electronics have undergone multiple structural and electrical optimizations from the 2021 to 2022 iterations, improving dynamic stability during jumps, somersaults, and balance-intensive actions. MAX is controlled by Tencent's proprietary software stack providing sub-millisecond response times and seamless integration of motion planning and perception.