






Intro
The primary objective of developing Moxi is to act as a collaborative robot (Cobot), providing augmentation to clinical staff in acute care hospitals by performing routine, high-frequency logistical tasks. Diligent Robotics’ mission centers on time reclamation, addressing the significant issue that nurses and other clinical personnel spend, on average, 30% of their shift engaged in non-care activities, such as fetching supplies, delivering lab samples, and retrieving medications. By automating these tasks, Moxi aims to mitigate nurse burnout, improve operational efficiency, and ultimately allow staff to dedicate more time to direct patient care.
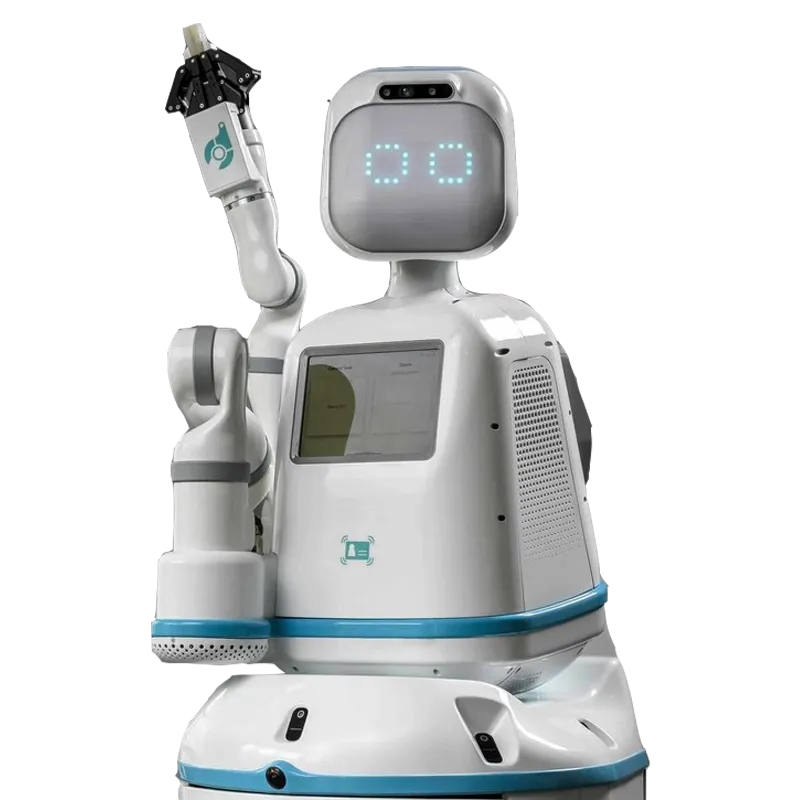
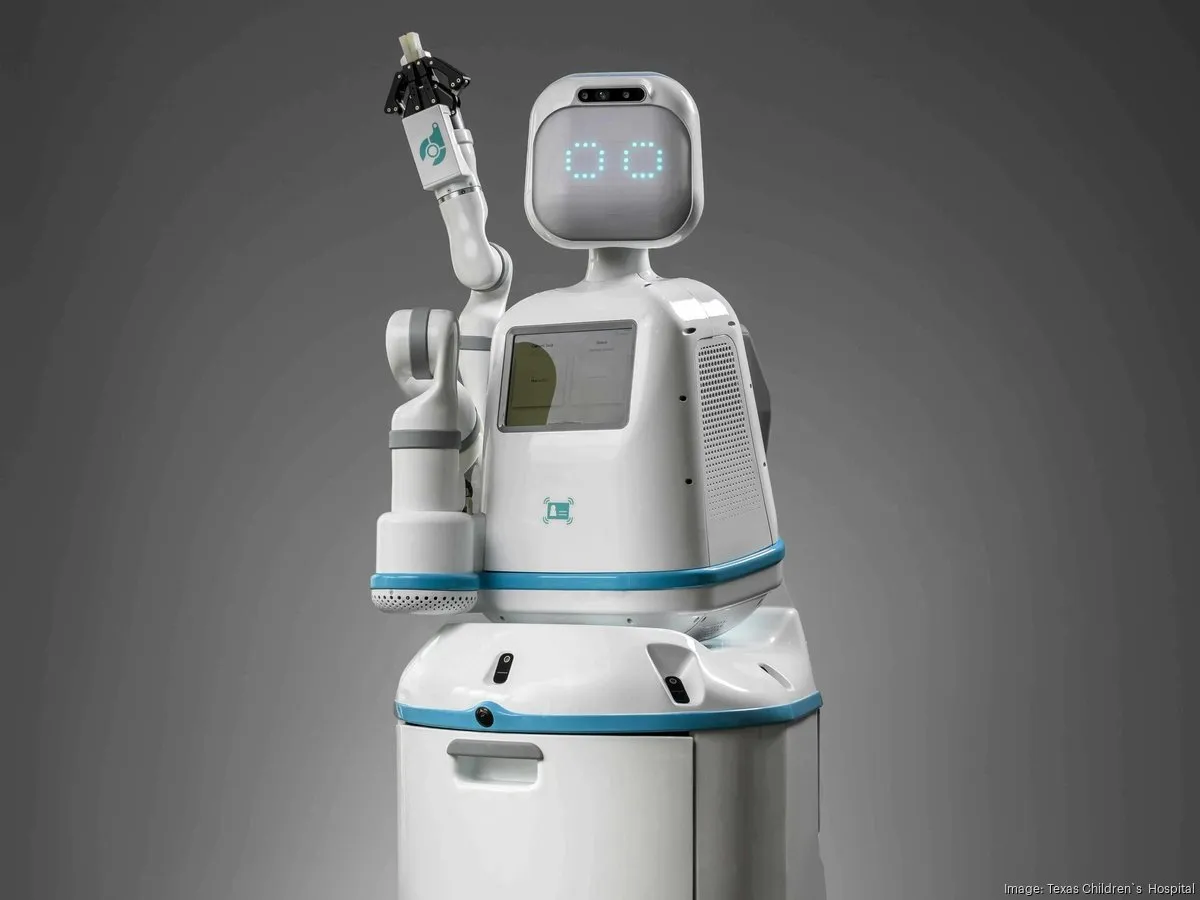
Moxi is a sophisticated AMMR engineered specifically to operate within the existing semi-structured environment of hospitals without requiring costly infrastructure modifications. Its core functional components include a highly maneuverable wheeled base, designed to safely navigate standard hospital hallways and crowded areas, and a dedicated robotic arm and gripper for performing dexterous manipulation tasks. The robot’s physical interaction is enhanced by its social features; the head unit displays expressive LED eyes, designed to promote co-existence and social intelligence, ensuring it is perceived as a teammate rather than an obstacle. The integration of locking compartments is crucial, enabling the robot to maintain a secure chain of custody for sensitive medical items, thereby meeting the stringent security needs of medication and sample transport.