





Intro
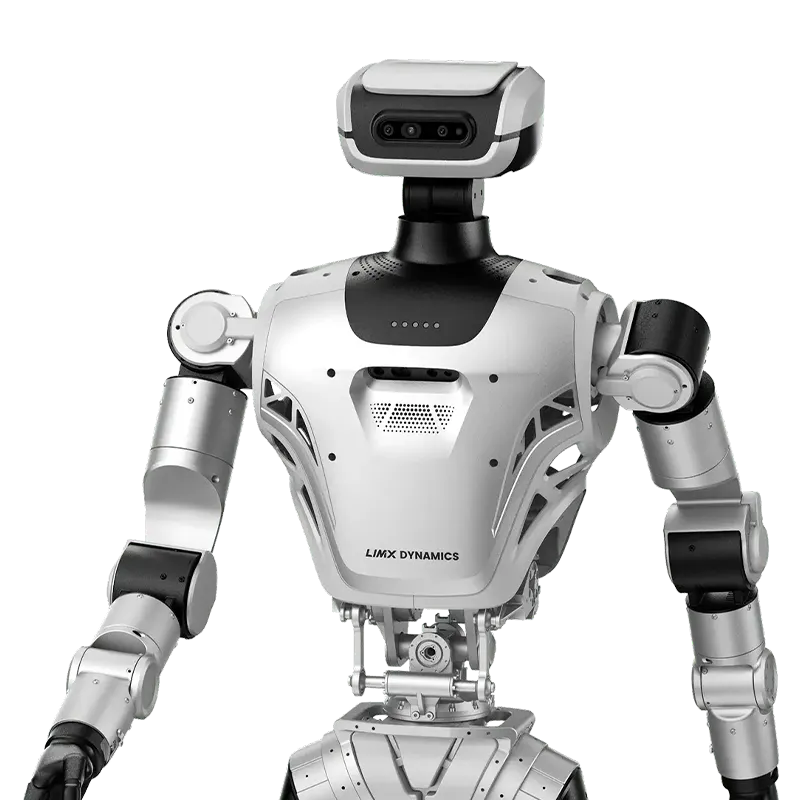
Oli’s detailed physical structure integrates human proportions with advanced engineering materials to achieve its specified performance metrics. Standing 165 cm tall, the robot’s mechanical profile includes a shoulder width of 55 cm and an arm length of 70 cm. The core mechanical design is modular, facilitating quick maintenance and configuration changes, such as swapping end-effectors such as grippers and bionic hands.
Oli is highly articulated with a core body articulation of 31 Degrees of Freedom, excluding end-effectors.
- Locomotion: Each of the two legs features 6 DoF, for complex bipedal walking, bending and squatting.
- Manipulation: Each of the two arms features 7 DoF, providing human-like reach and dexterity.
- Torso and Head: The body includes a 3 DoF waist for twisting and bending, and a 2 DoF neck for perception and interaction.
- Proprietary end-effectors: 1-DoF 2-finger gripper and a 4-DoF 3-finger gripper.
Thermal management for the critical control area is handled through an air-cooled system, ensuring sustained performance under high computational load. A key architectural feature is the incorporation of the power source and communication hardware directly into the structural components, simplifying wiring complexity and maximizing space efficiency.
Oli uses proprietary electric actuators. These actuators are integral to the robot's functionality, as they integrate the motor, necessary wiring paths, and internal cooling mechanisms within a compact unit. This integrated design is crucial for achieving the high torque-to-weight ratio and the precise responsiveness required for maintaining dynamic bipedal stability. It is able to generate a maximum joint torque of 150 N.m, achieving a maximum speed of 1 m/s of arm movement. Furthermore, these components house integrated torque sensors, providing high-fidelity force feedback essential for closed-loop control.