








Intro
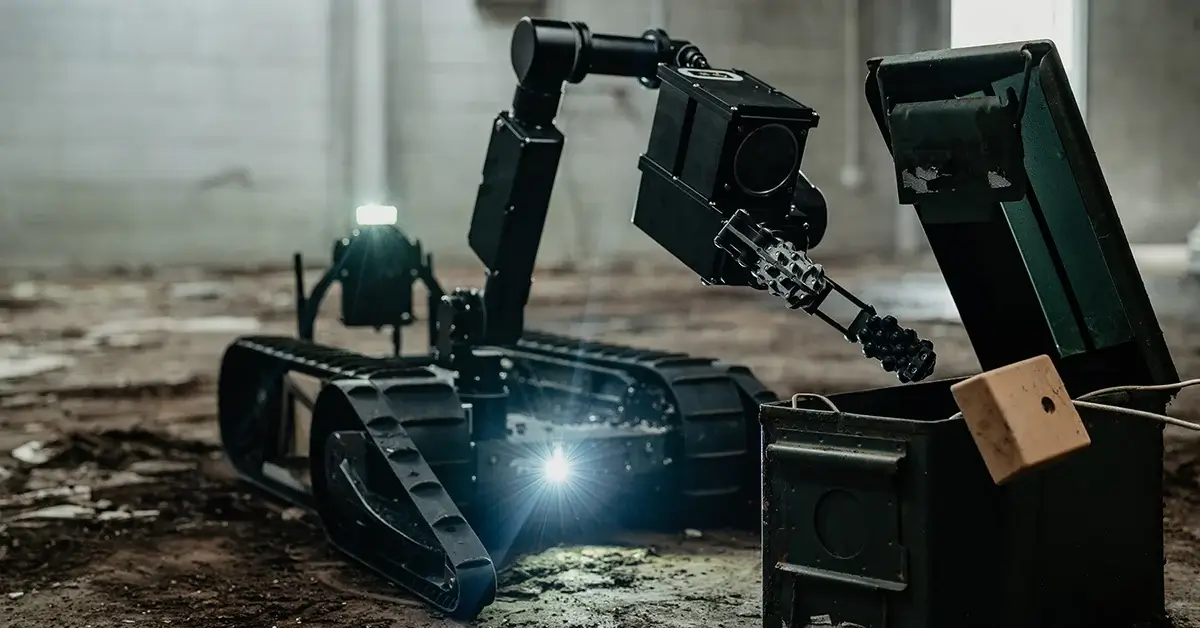
The PackBot 525 is a man-transportable, multi-mission unmanned ground vehicle engineered to support operators at standoff distances in dangerous environments. It features a tracked mobility platform with flippers for climbing stairs, traversing rubble, and navigating constricted spaces that would challenge human responders. Deployable by a single operator in under two minutes and compact enough to stow in a vehicle trunk, the PackBot 525 balances portability with robust mission performance.
At its core is a modular manipulator arm capable of lifting up to 20 kg close-in and about 5 kg at full extension (187 cm), allowing it to lift, move, or position objects, including ordnance or equipment with precision from a safe distance.
Situational awareness is delivered via multiple HD cameras mounted on the head and turret, enhanced illumination, and an integrated laser rangefinder that provides accurate distance measurement to targets. The robot can also be equipped with optional payloads such as FLIR LWIR thermal imagers, CBRN sensors, and disruptors for specialized missions.
Control is provided through the uPoint Multi-Robot Control System, a ruggedized tablet interface that gives operators real-time navigation visuals, sensor data, and command capability. Communication is handled via the MPU5 radio on a Wave Relay mobile ad hoc network (MANET), enabling robust and extended remote operations.