

Intro
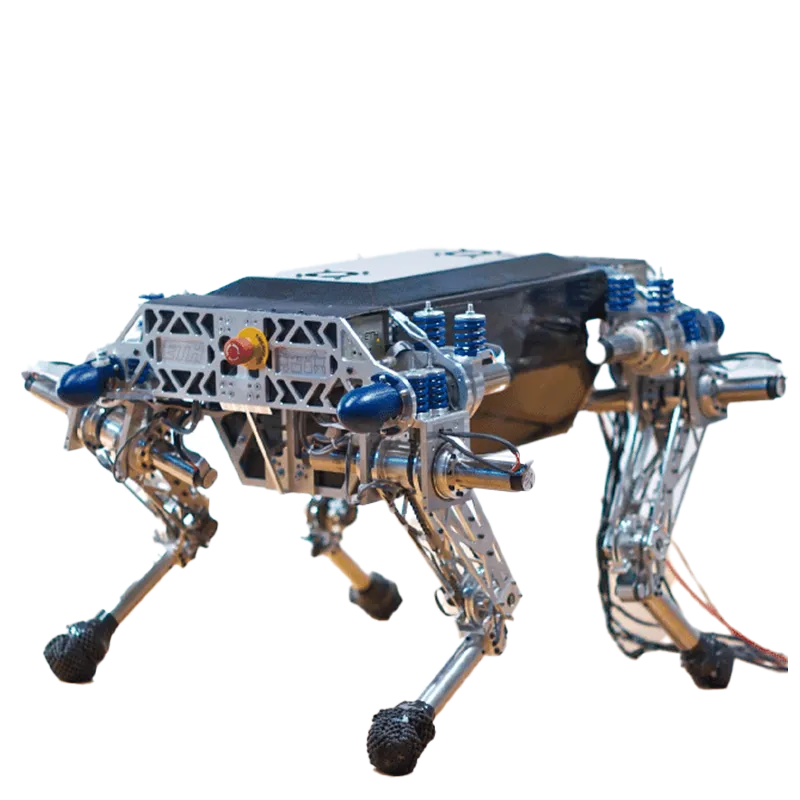
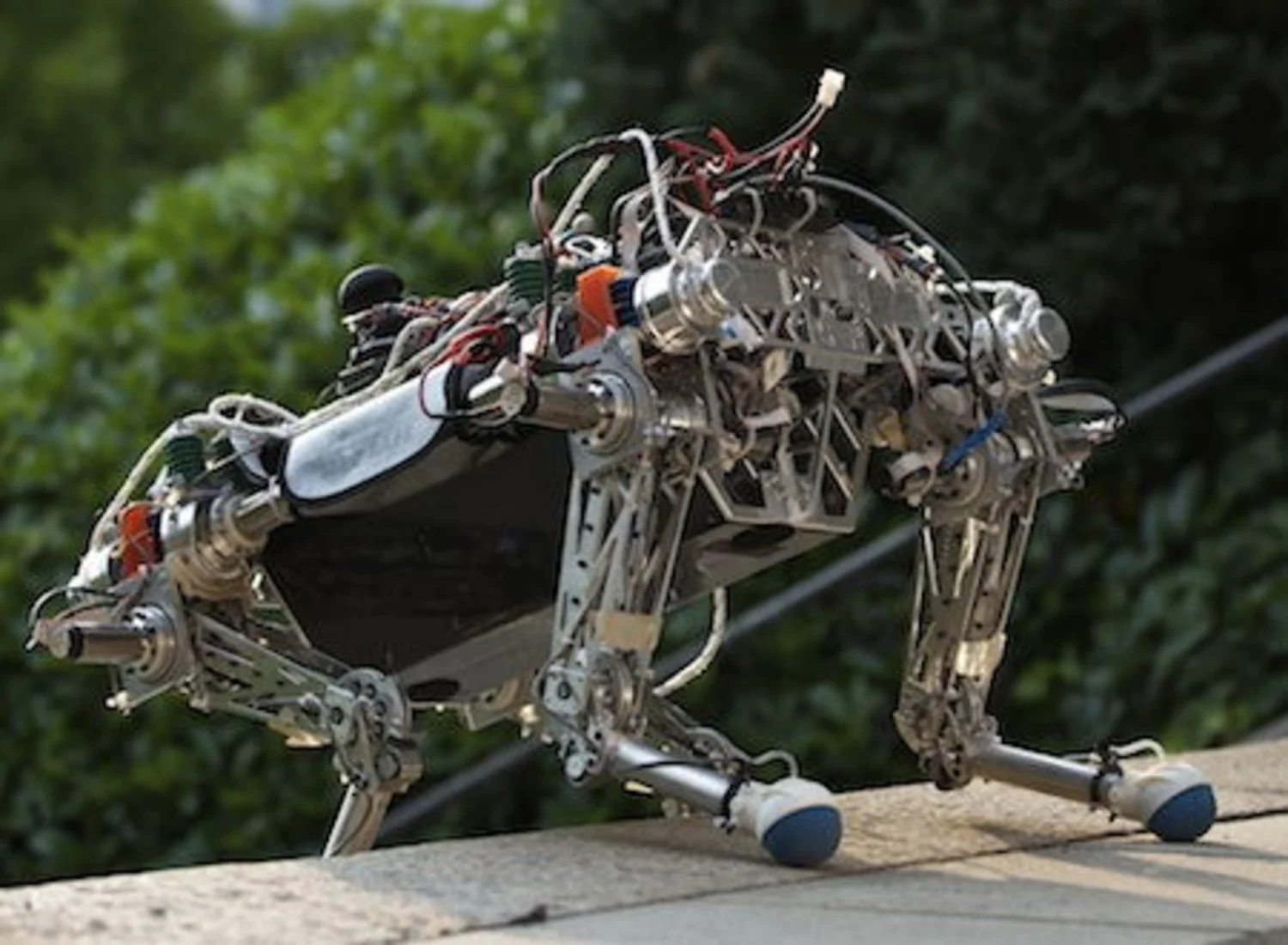
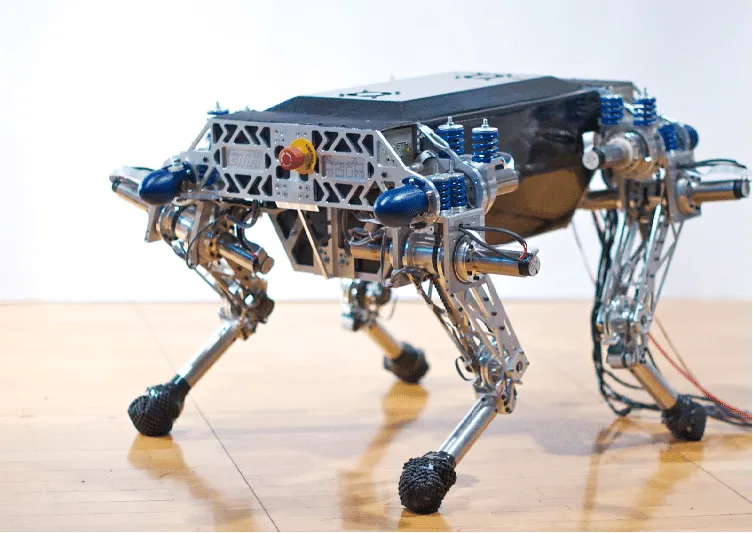
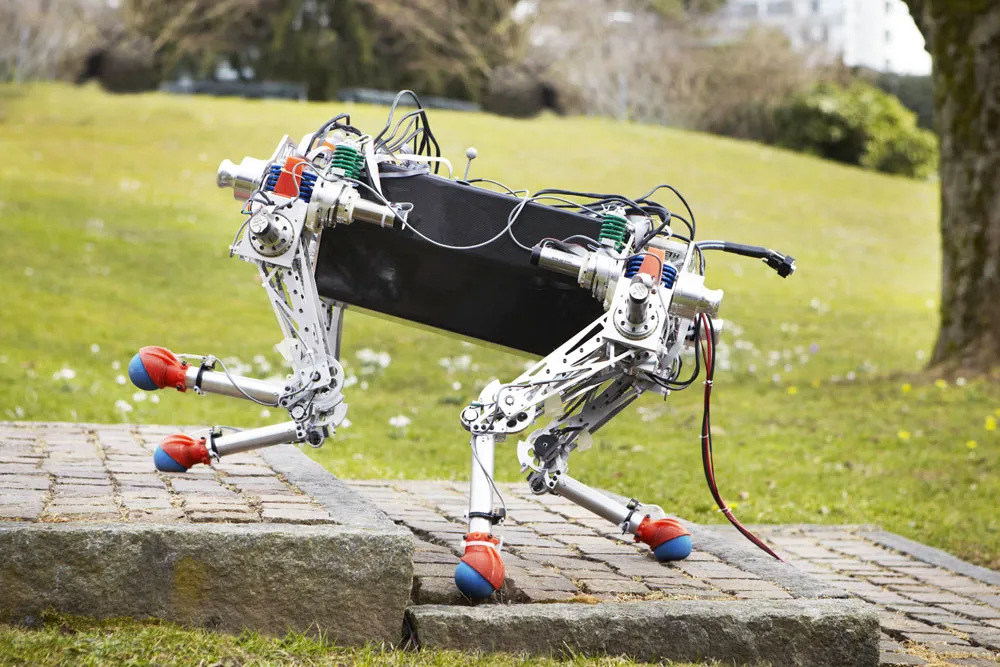
StarlETH is a fully actuated quadrupedal robot with four identical legs arranged in an X-configuration mounted on a rigid torso approximately 0.5 meters long. Each leg has three degrees of freedom arranged like mammalian hips and knees, enabling naturalistic, flexible leg movements including full extension and retraction. The robot uses 12 series elastic actuators with compliant elements designed to emulate muscle-tendon systems, allowing torque control and temporary energy storage. Its mechanical springs protect gears from impact, improve efficiency, and enable high torque fidelity. The robot's lightweight construction (~23 kg) focuses actuator placement on the torso for reduced leg inertia and faster leg swing. Onboard inertial measurement units and precise joint encoders provide accurate state estimation, enabling autonomous gait execution without external sensors or motion capture.