



Intro
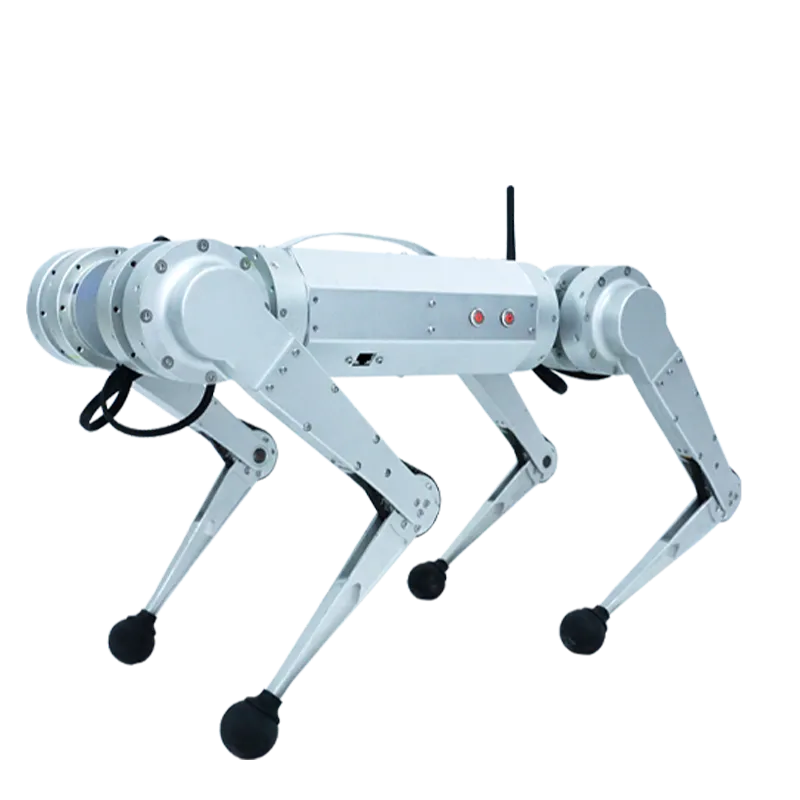
The Y10 quadruped robot integrates advanced servo motors (brushless with planetary reducers) providing large torque and high bandwidth torque feedback for precise control. Its legs are constructed with high-strength lightweight materials and utilize a belt drive to reduce weight and inertia, contributing to efficient and powerful locomotion. The modular joint driver and control electronics enable a flexible and small-sized joint design, resulting in strong structural rigidity. This architecture supports customizable development and expansion for secondary applications.