Intro
The MIT Biomimetic Robotics Lab, led by Professor Sangbae Kim since 2009, focuses on developing highly dynamic, legged robots inspired by biological systems such as cheetahs, dogs, lizards, and insects. The lab emphasizes rigorous engineering design combined with biological principles to create robots capable of agile mobility, obstacle negotiation, and robust manipulation. Their flagship projects include the Cheetah robot series, designed for speed and autonomous operation in complex environments. Unlike typical industrial robots optimized for repetitive manufacturing tasks, the lab’s robots dynamically interact with unstructured environments, aiming for human-level physical task capabilities. The lab uses a hands-on, DIY manufacturing approach, building most components themselves to innovate beyond standard hardware constraints. Their work bridges fundamental robotics, dynamics, actuation, and control, advancing future applications in transportation, prosthetics, and autonomous machines.
Robots
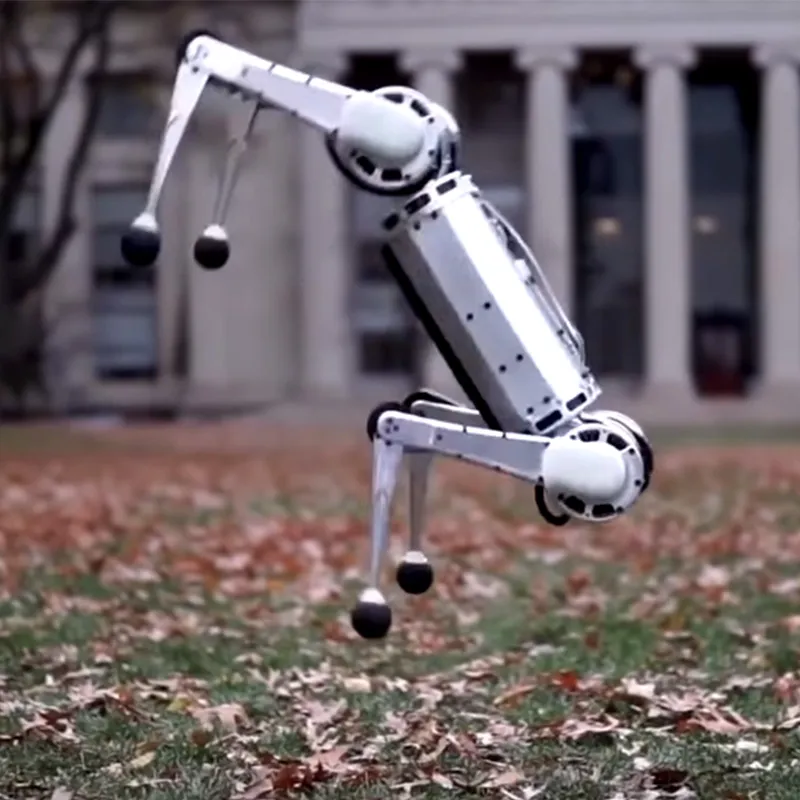
- MIT Cheetah Series (I, II, III):
Autonomous quadruped robots that mimic the speed, agility, and dynamic locomotion of a real cheetah. Capable of running up to 3 meters/second, leaping over obstacles, and navigating challenging terrain with minimal supervision. - Gecko-inspired Climbing Robot:
Developed based on the microstructure of gecko feet, using directional adhesives to climb vertical surfaces, showing the lab’s bioinspired design capability in adhesion. - Meshworm:
A soft, autonomous robot that mimics earthworm movement through peristaltic motion, intended for flexible, modular locomotion in tight spaces.
Specialism
- Hyperdynamic Locomotion:
Robots exhibit rapid acceleration, dynamic stability, and the ability to jump over large obstacles with flexible body articulation. - Bioinspired Design:
Leveraging biological principles (e.g., tendon elasticity, animal gait patterns) for energy-efficient and agile robot movement. - Custom Actuation and Control:
Development and integration of novel polymeric multi-material manufacturing processes, smart impedance control units, and optimized force coordination for multi-DoF legs. - Rapid Prototyping & Manufacturing:
In-house production of custom parts using 3D printing, CNC machining, and laser cutting to tailor designs for high performance. - Adaptive Behavior:
Use of hierarchical control architectures and advanced dynamic modeling enabling robots to interact and adapt in real-world unstructured environments.
Business Viability
As an academic lab at MIT, the Biomimetic Robotics Lab primarily focuses on research innovation, technology demonstration, and knowledge dissemination rather than commercial business activities. However, its technological breakthroughs have attracted wide academic and media attention, influencing the robotics field globally. The lab has spawned startups and collaborations—its technology foundations contribute to industries like robotics mobility, prosthetics, and autonomous systems. Strong institutional support, continuous government and industry research funding, and association with MIT maintain its sustainability and impactful presence in cutting-edge robotics.