



Intro
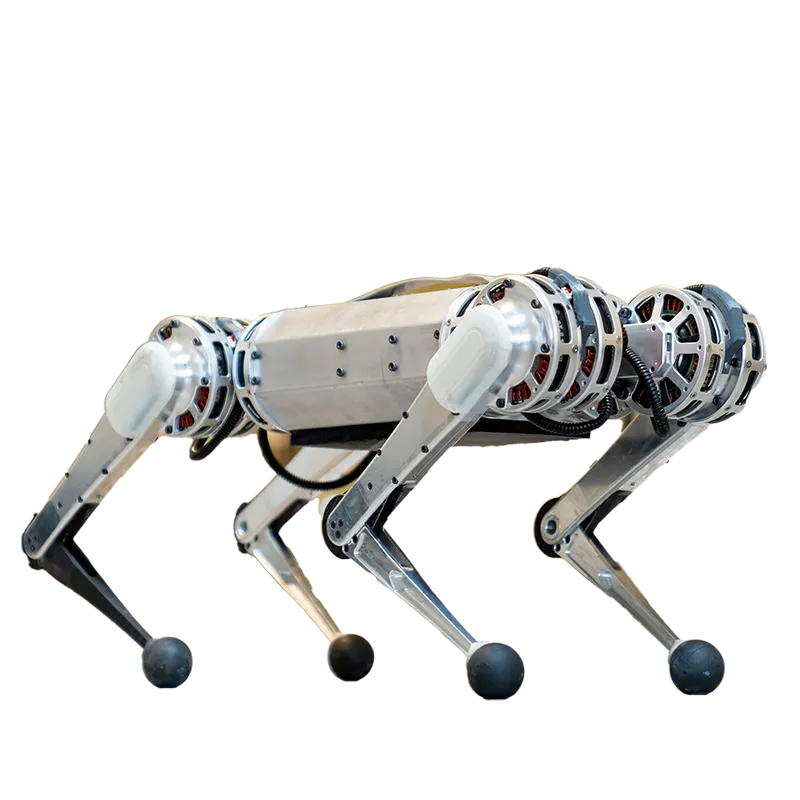
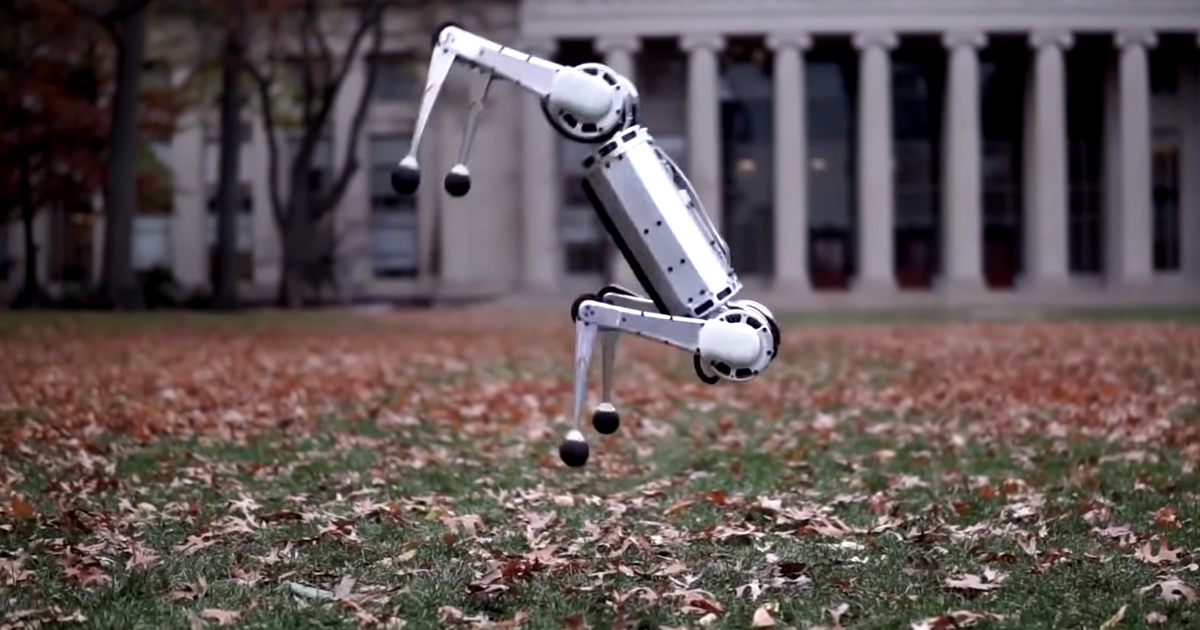
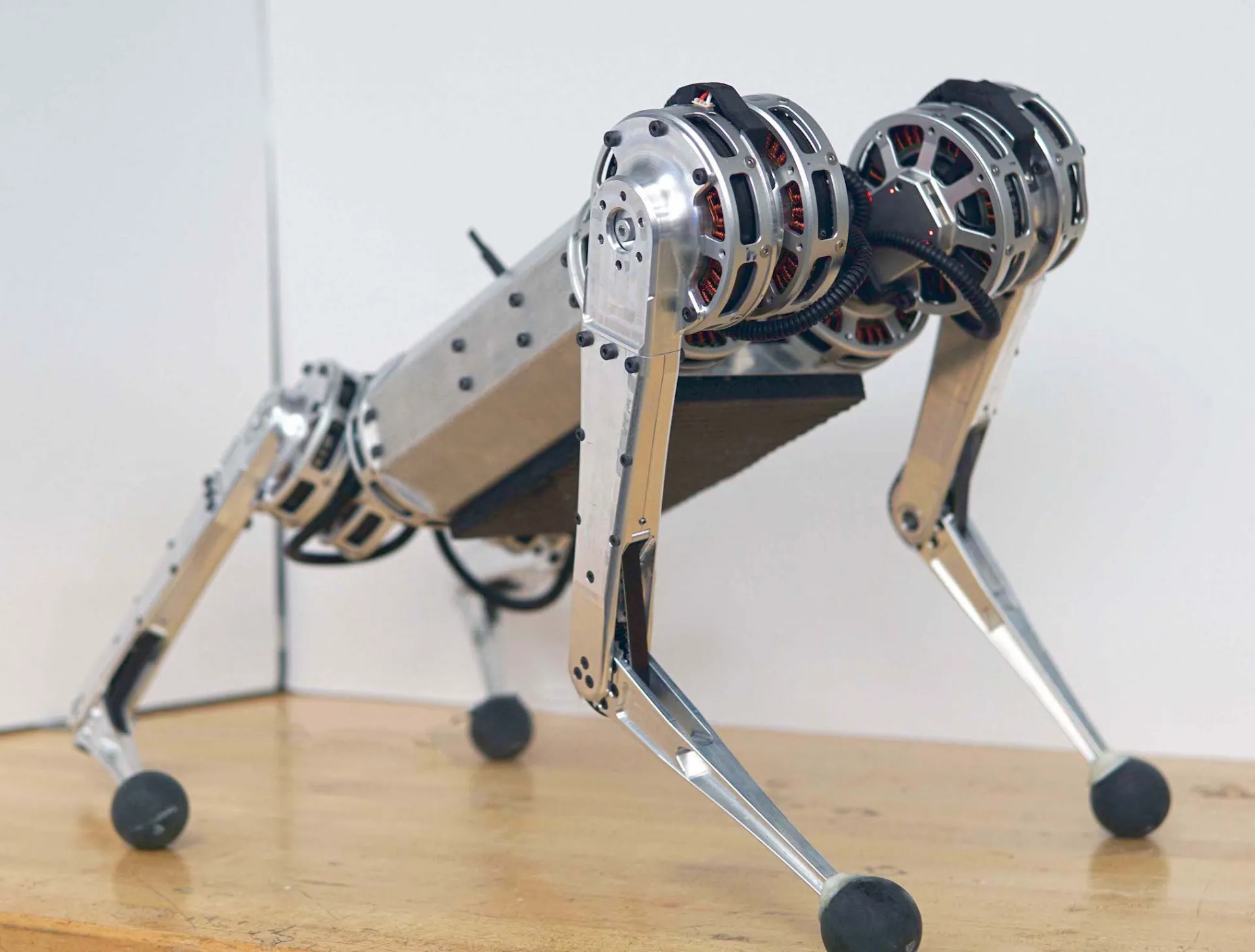
Mini Cheetah is a compact robot (48 cm length, 30 cm height, 27 cm width) weighing about 9 kg. Each leg has three identical, off-the-shelf motor modules providing three degrees of freedom, resulting in 18 actuated degrees of freedom total. The robot integrates high-torque, high-speed actuators, an inertial measurement unit (IMU), hall-effect motor encoders, and a powerful onboard Intel Atom processor running Linux for real-time control. Its robust design uses aluminum and plastic guards and supports dynamic behaviors unachievable by many heavier robots.