




Intro
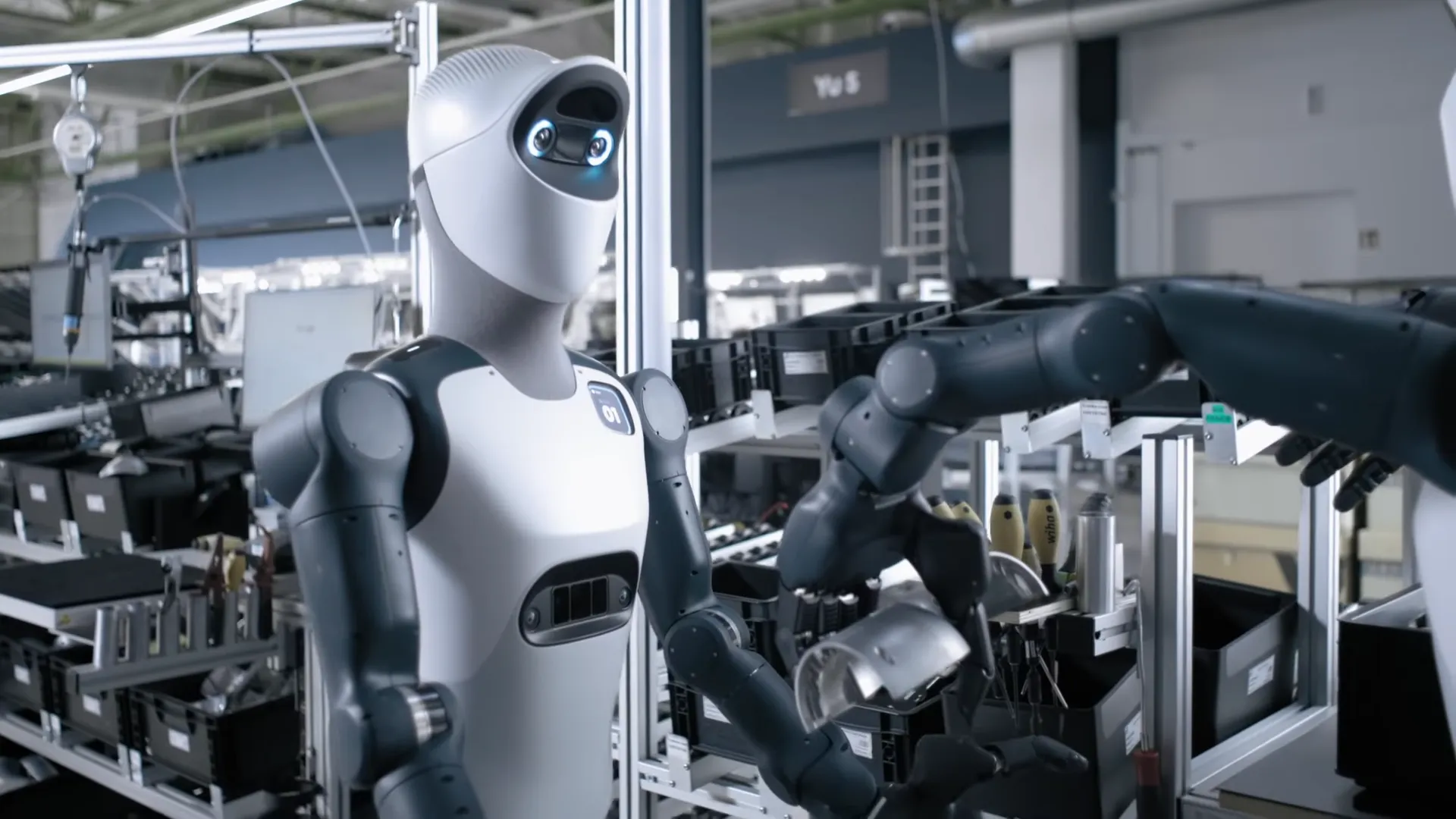
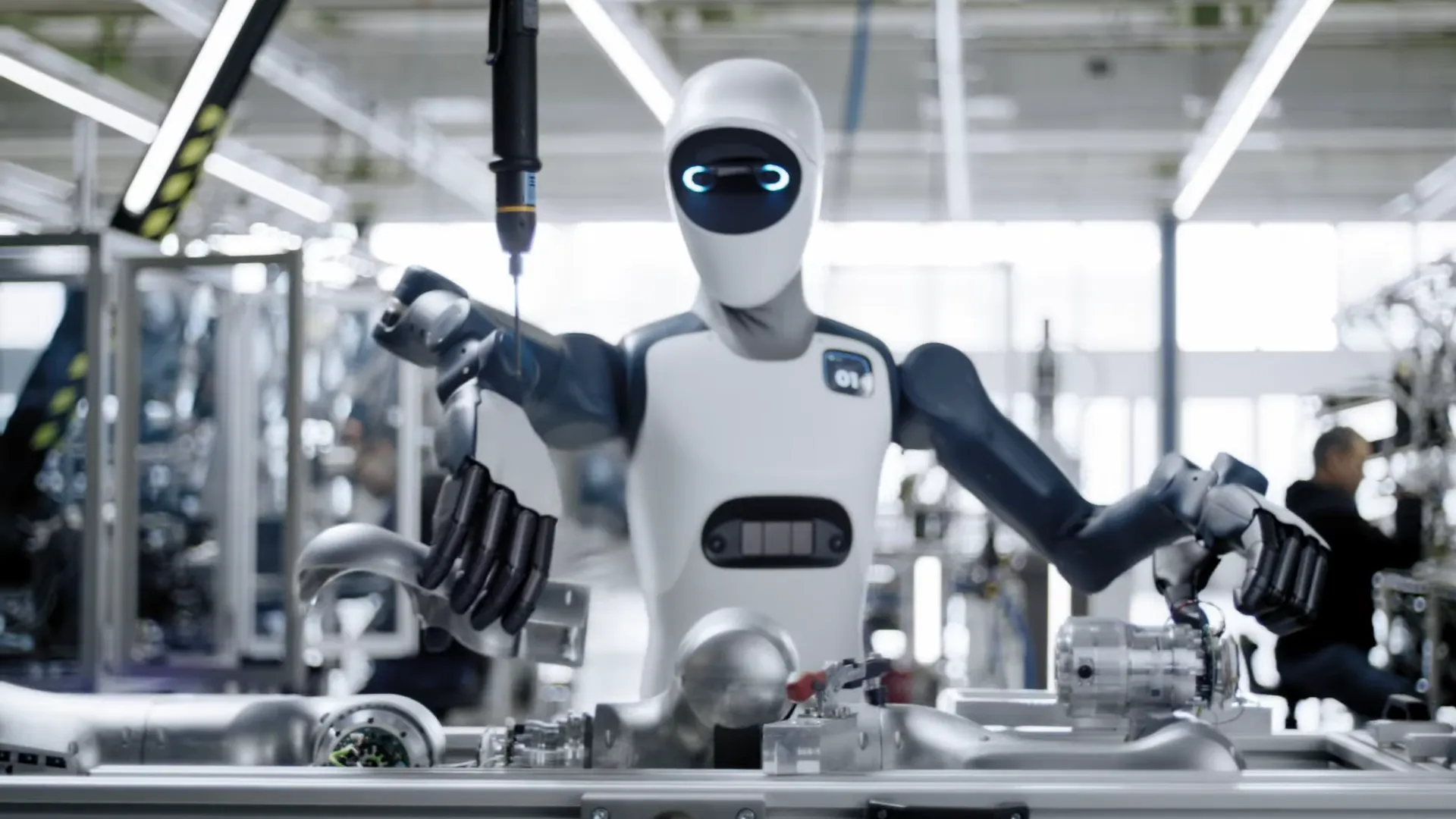
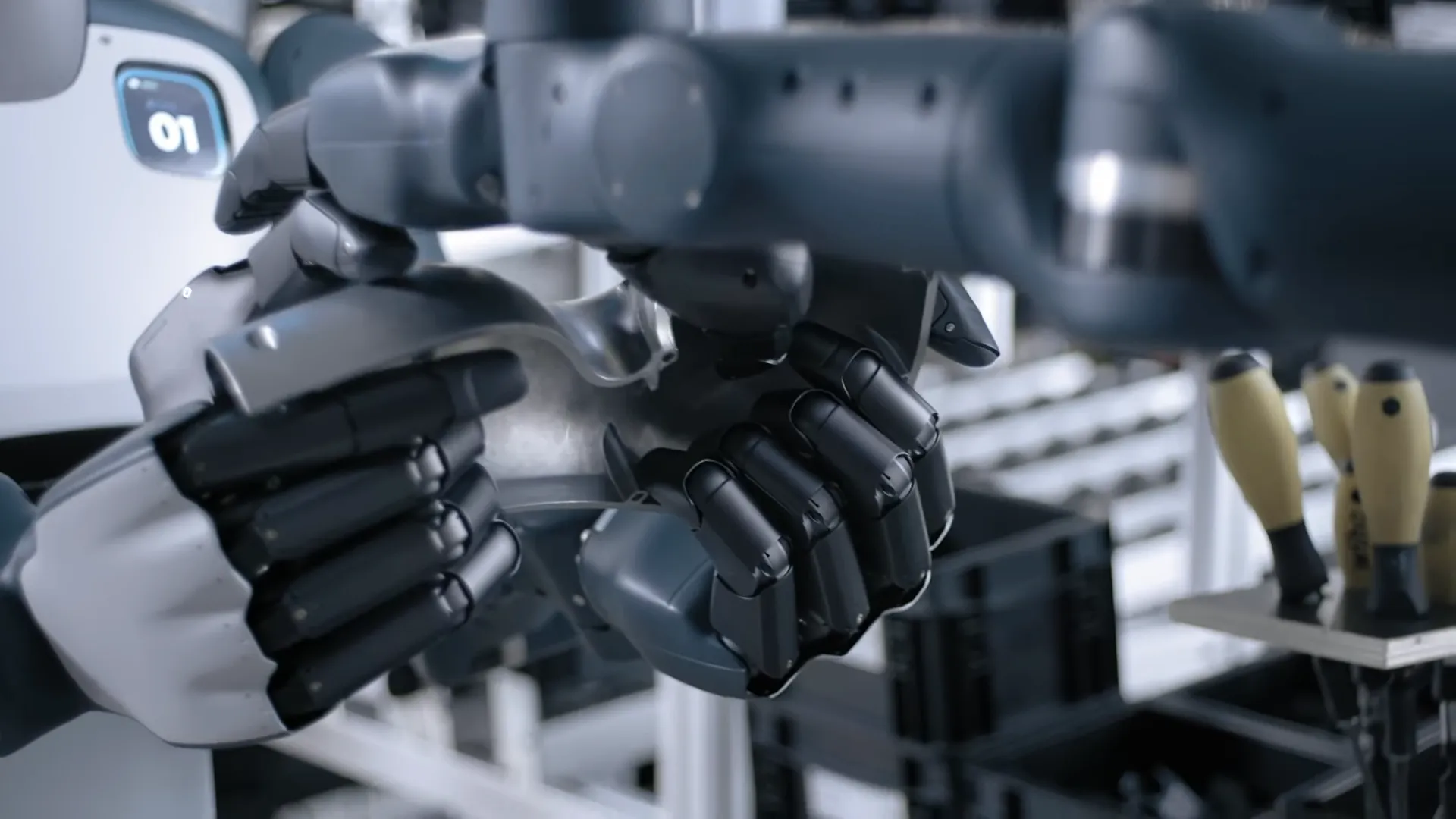
Agile ONE stands 1,740 mm tall and weighs 69 kg. It walks at up to 2 m/s, equivalent to a brisk human walking pace, and carries a payload of up to 20 kg. Its bipedal locomotion system is engineered for stability and fluid movement in industrial environments, enabling the robot to navigate factory aisles, move between workstations, and operate in spaces designed for human proportions without infrastructure modification. The robot's most technically distinct subsystem is the Agile Hand, which features five fingers, 21 articulated joints, and integrated force sensors and tactile sensors at every joint. This sensor density enables the hand to detect and modulate grip force with high precision, supporting tasks ranging from grasping small screws to applying consistent load to larger components. Agile Robots describes the Agile Hand as achieving world-leading dexterity for a robotic hand at its time of launch. The finger modular design allows reconfiguration for different task requirements.
Agile ONE's intelligence is provided by a layered AI architecture operating across three functional tiers: strategic task planning and reasoning, rapid reactive behaviour, and fine motor control. The Robot Foundation Model underlying this architecture is trained on real-world industrial production data, supplemented by extensive simulation datasets and teleoperation-derived human data from Agile Robots' data farms. This multi-source training approach gives the model the breadth to handle real-world task variability in industrial settings. Perception is handled by intelligent cameras and LiDAR for spatial awareness and obstacle detection, including the ability to track movements and detect obstacles even when the robot is carrying oversized objects that would obstruct a human operator's sightline. Human-robot interaction is facilitated by responsive eye displays, proximity sensors, a chest-mounted information screen, and vocal feedback, providing clear real-time communication of the robot's operational status. Battery capacity, runtime, and recharge time specifications have not been disclosed by Agile Robots as of this audit. The robot is manufactured entirely in-house at Agile Robots' German facility, with volume production beginning in early 2026.