





Intro
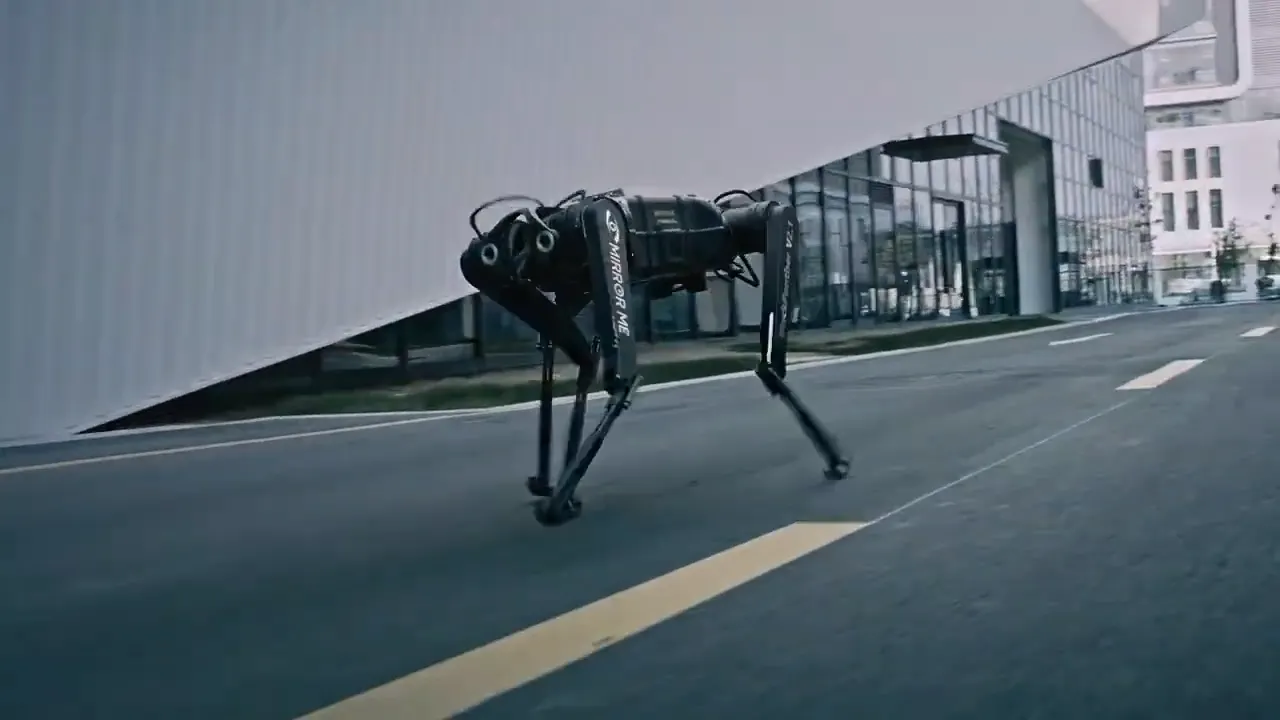
Black Panther II is a cutting-edge quadruped robot engineered for extreme speed and dynamic performance. Developed by MirrorMe Technology, the robot represents a shift from traditional quadruped designs that prioritize stability and payload toward systems optimized for velocity and biomechanical efficiency. Its structure incorporates lightweight materials such as carbon fiber and aluminum alloy, featuring a compact body approximately 0.63 meters tall and weighing around 38 kg, enabling rapid acceleration and reduced inertia.
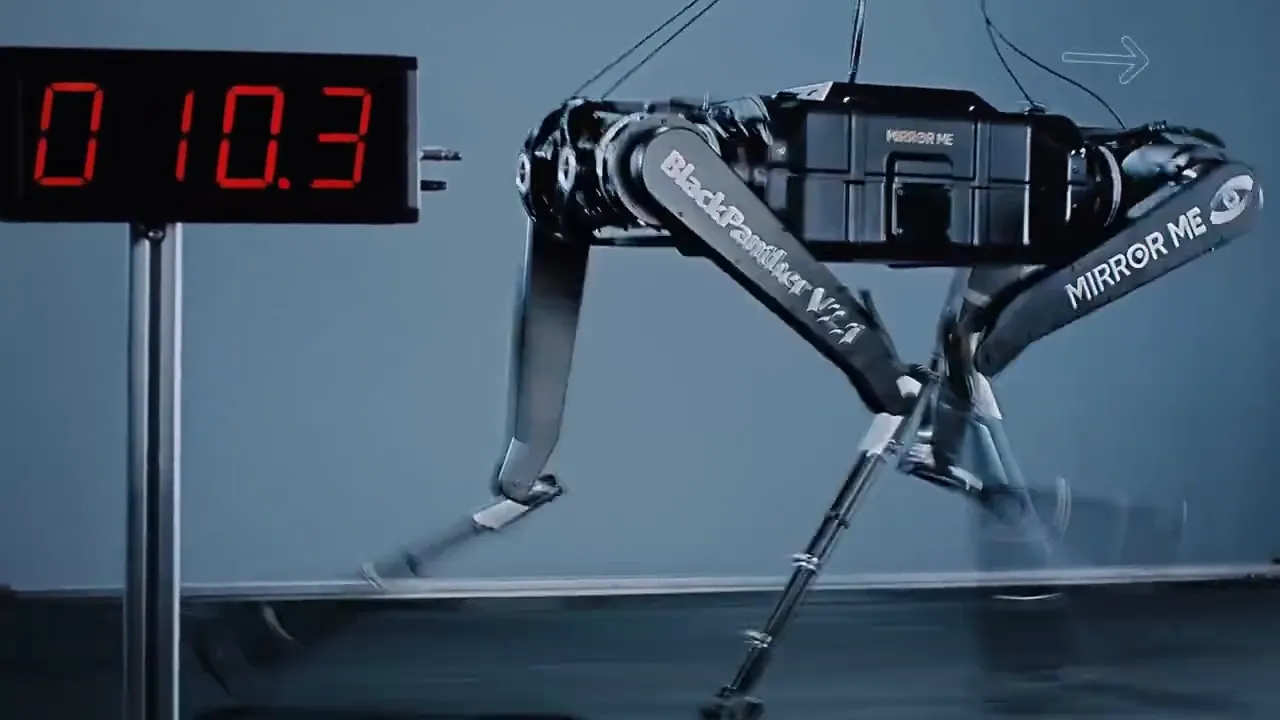
A defining feature of Black Panther II is its spring-loaded knee joint system (Joint motion range: ABAD:-90° ~ 90°,HIP:-180° ~ 180°,KNEE:20° ~ 150°,SPRING:0 ~ 9cm), inspired by animal locomotion, which allows for energy storage and release during running cycles. This enables high stride frequency (up to ~5 strides per second) and efficient high-speed motion.
The robot has demonstrated exceptional performance, completing a 100-meter sprint in 13.17 seconds and reaching a peak speed of 9.7 m/s, with internal tests reportedly exceeding 10–13 m/s, making it one of the fastest quadruped robots ever recorded.