





Intro
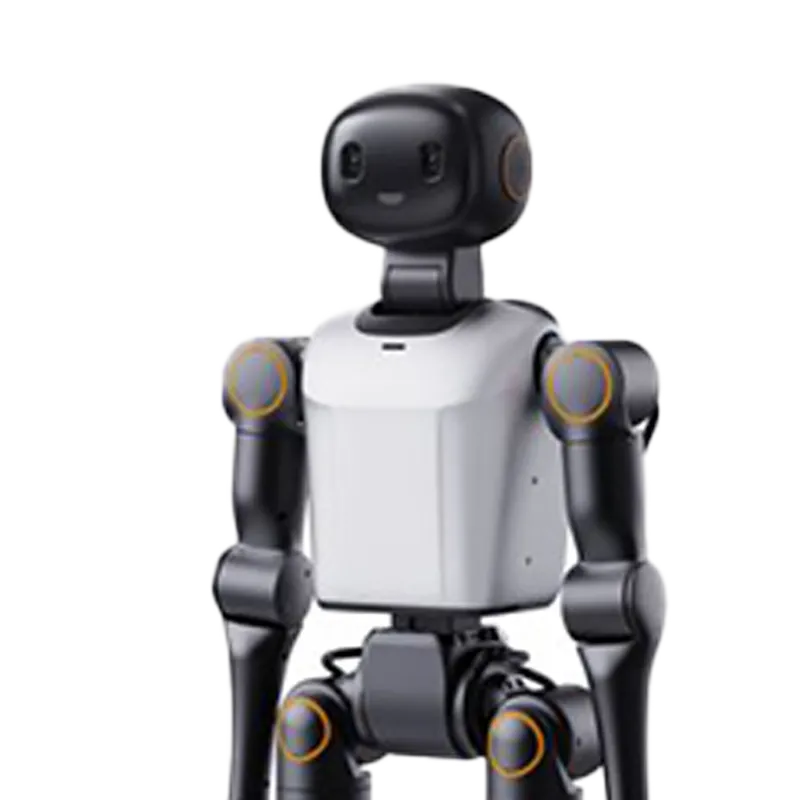
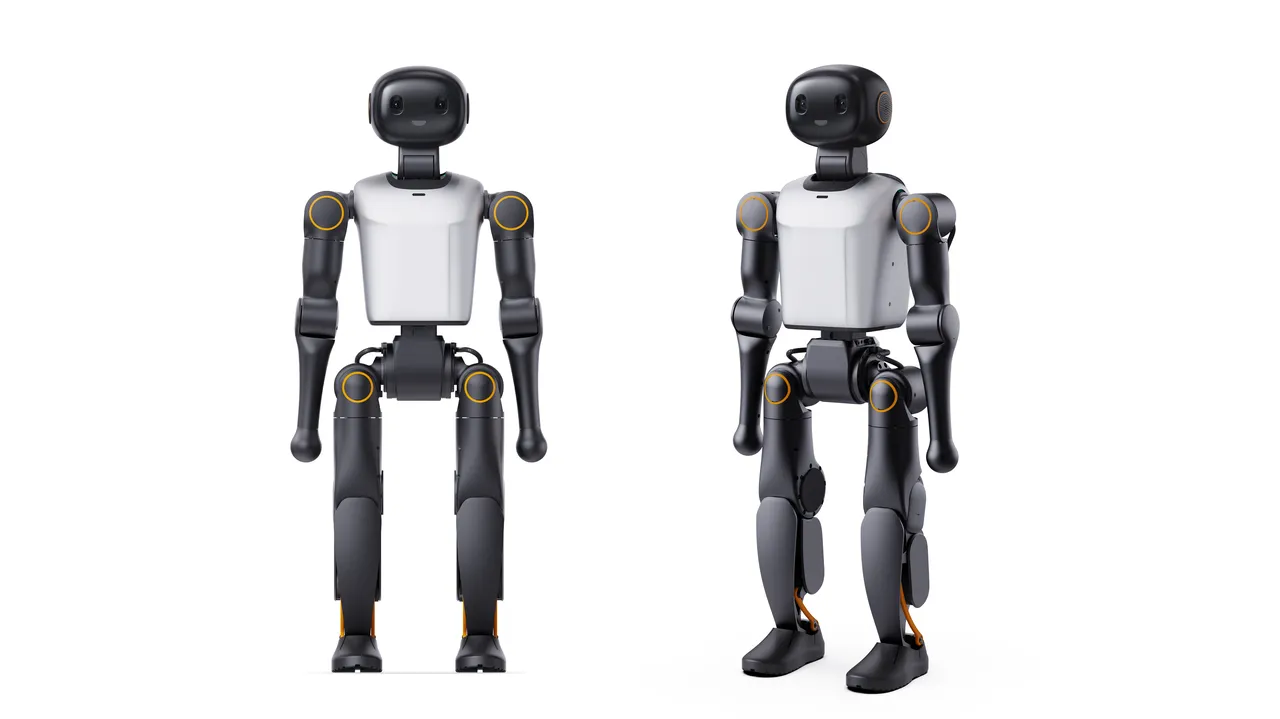
The Booster K1 features a compact body with 22 dynamically controlled joints, including hips, knees, ankles, arms, and head. It employs full-force-controlled joints with dual encoders enabling precise motion control in torque, velocity, and position. Its sensor suite includes a 3D depth camera, 9-axis IMU for balance, microphone array for audio input, and touch sensors for safe interaction. The K1 runs on an embedded NVIDIA Jetson Orin NX (8GB), enabling strong on-board AI inference for perception and control tasks.