





Intro
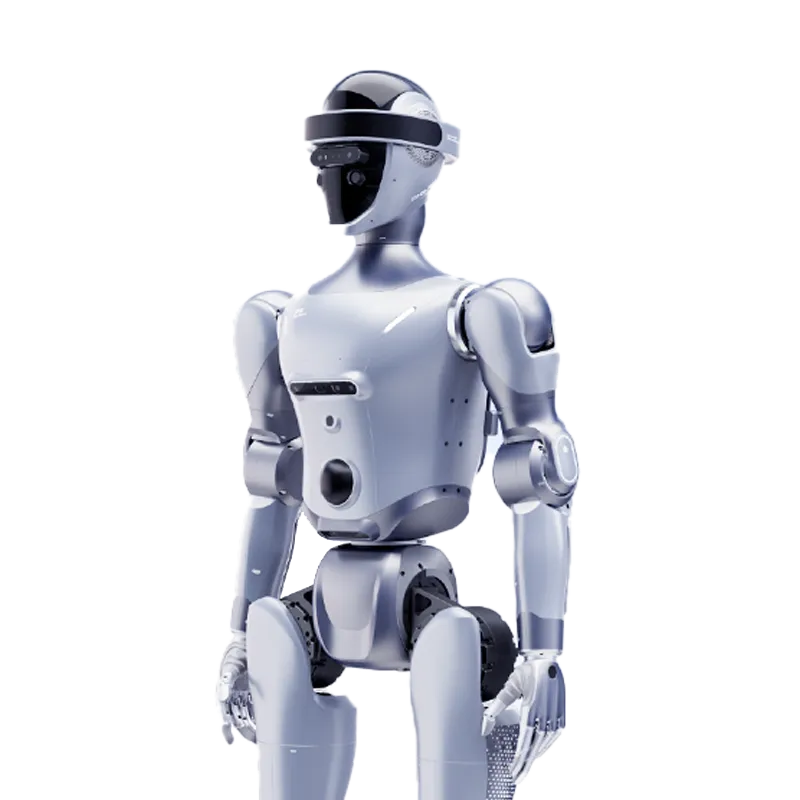
The CASBOT 02 (standard model) is a full-size bipedal humanoid robot designed for human-centric interaction, guidance, and service-oriented deployments in indoor environments. With a compact humanoid profile measuring 1630 × 510 × 280 mm (H × W × L), the robot balances a human-like presence with mechanical simplicity, making it suitable for retail, education, exhibitions, and hospitality scenarios. Its design philosophy prioritizes safe interaction, expressive motion, and embodied intelligence, rather than heavy manipulation or industrial payloads.
From a kinematic perspective, CASBOT 02 features 25 degrees of freedom (excluding dexterous hands), distributed across a 2-DoF head (yaw, pitch), 5-DoF per arm, 1-DoF waist, and 6-DoF per leg, enabling coordinated whole-body motion, expressive gestures, and stable bipedal locomotion. When equipped with dexterous hands, each hand adds 11 additional DoF, significantly enhancing fine manipulation and expressive interaction capabilities. The robot’s joints are driven by electric actuators capable of delivering a peak joint torque of up to 150 N·m, supporting dynamic motion while maintaining balance and compliance.
The onboard compute architecture is split into a dual-layer system to support both real-time control and high-level intelligence. The robot delivers 275 TOPS of AI compute, with an NVIDIA Orin AGX serving as the main Robot Control Unit (RCU) for perception, planning, and large-model inference, while an RK3588-based HRU handles human–robot interaction, multimedia processing, and auxiliary tasks. Thermal management is handled through an air-cooling system, allowing stable operation in indoor environments with 25–85% relative humidity (non-condensing). Power is supplied by a ternary lithium battery and the system supports OTA (Over-The-Air) software upgrades, enabling continuous improvement of perception, interaction, and behavior models post-deployment.