





Intro
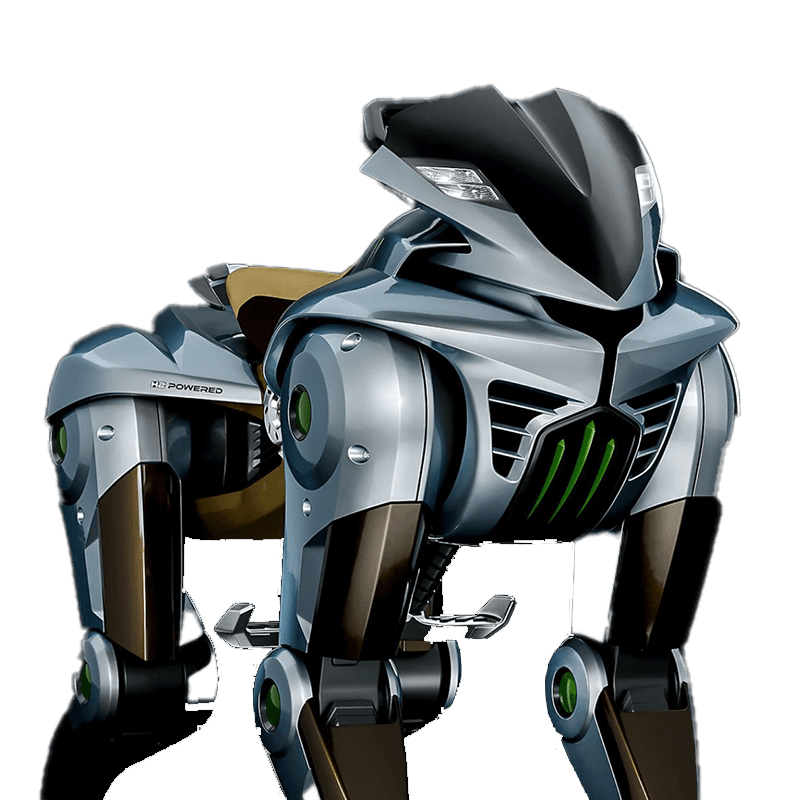
CORLEO is a four-legged, hydrogen-fueled robotic vehicle designed for off-road personal mobility akin to horseback riding in mountainous environments. Each leg integrates electric drive units powered by a 150cc hydrogen engine generator. The legs end in split rubber hooves engineered to absorb shocks and grip challenging surfaces. The rear legs employ independent swingarm mechanisms inspired by motorcycle suspension for enhanced stability and shock absorption. Riders mount the machine similar to a horse, controlling it through body-weight shifts detected by pressure sensors on foot plates and handlebars. Artificial intelligence and sensor fusion maintain real-time balance and gait adjustment, enabling movements like walking, running, jumping, and adjustable postures on inclines and uneven terrain. A heads-up display presents critical information such as hydrogen levels, navigation data, and rider posture feedback. With the ability to project visual guides onto the terrain at night, CORLEO supports safe riding in diverse lighting conditions. Constructed from metal and carbon materials, it embodies Kawasaki’s expertise in motorcycles and robotics.