



Intro
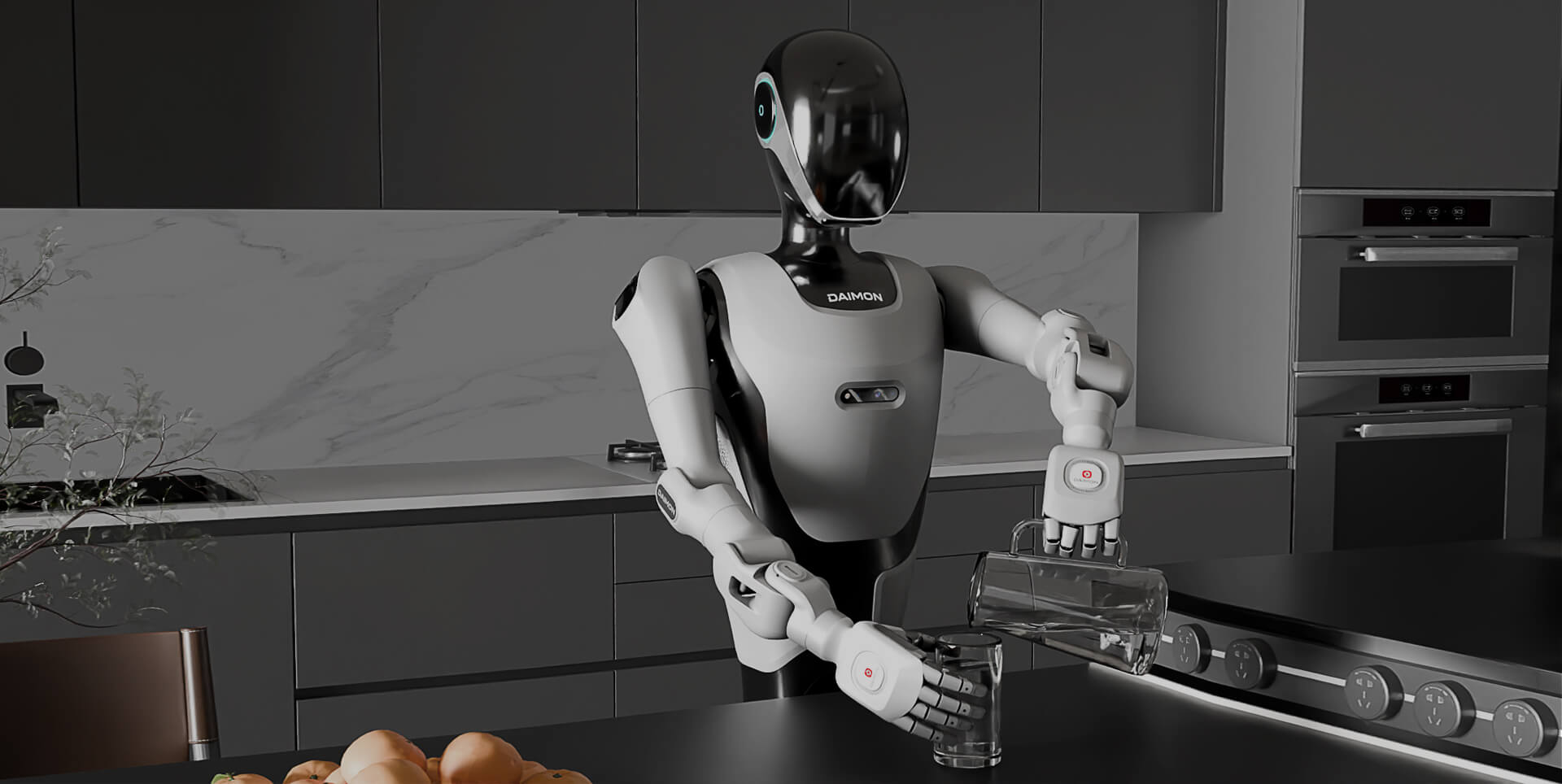
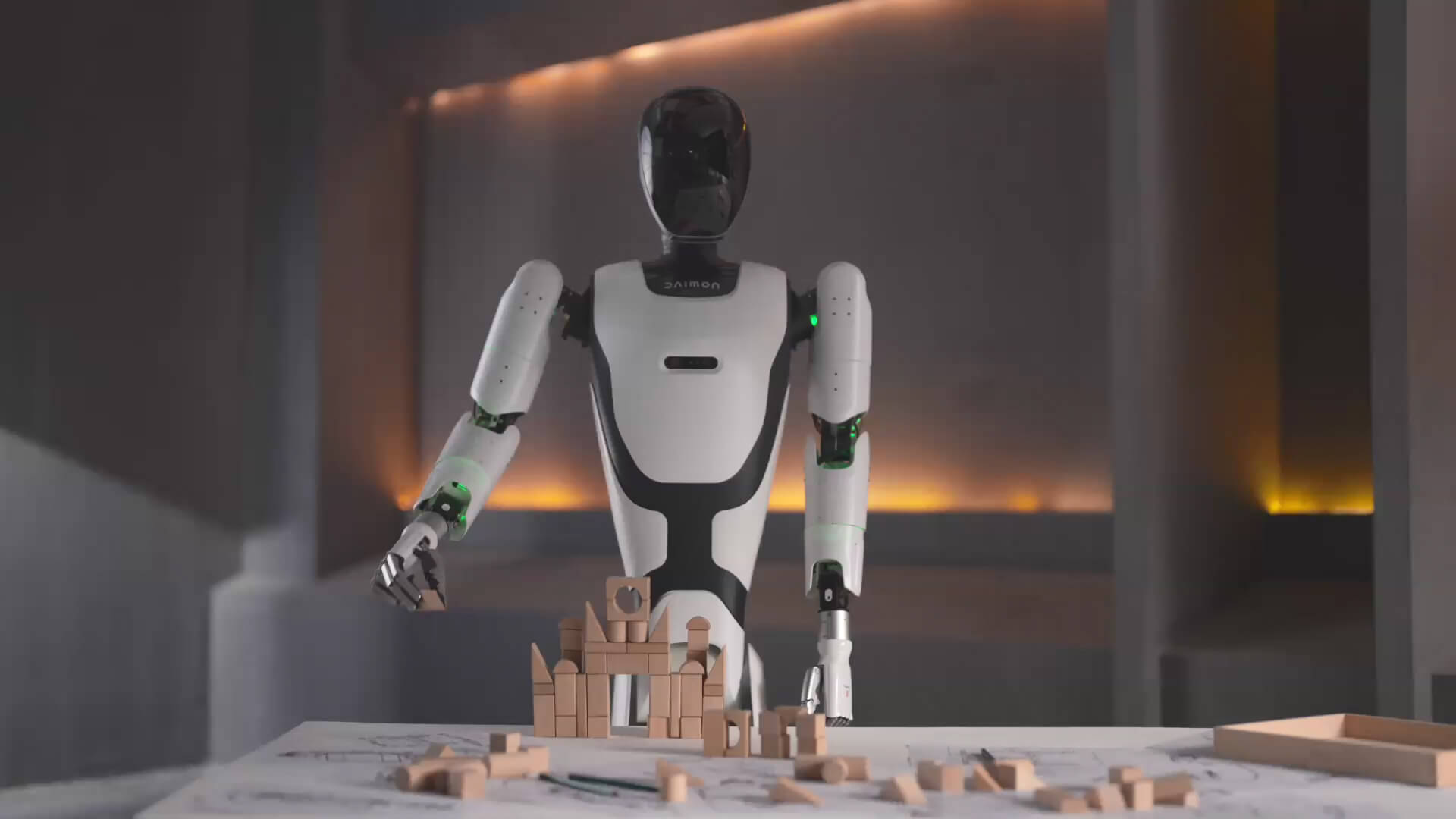
Daimon One integrates a biomimetic robotic hand with 11 degrees of freedom, including 6 active joints, designed to replicate human hand movements. The hand is equipped with fingertip visual-tactile sensors that provide real-time feedback on force, deformation, and material properties, enhancing manipulation precision. The robot supports teleoperation via an exoskeleton system that captures human motion data to improve control and learning. Daimon One’s design focuses on enabling complex, delicate tasks across various environments, with repeatability of ±0.2 mm and gripping forces optimized for safe handling.