









Intro
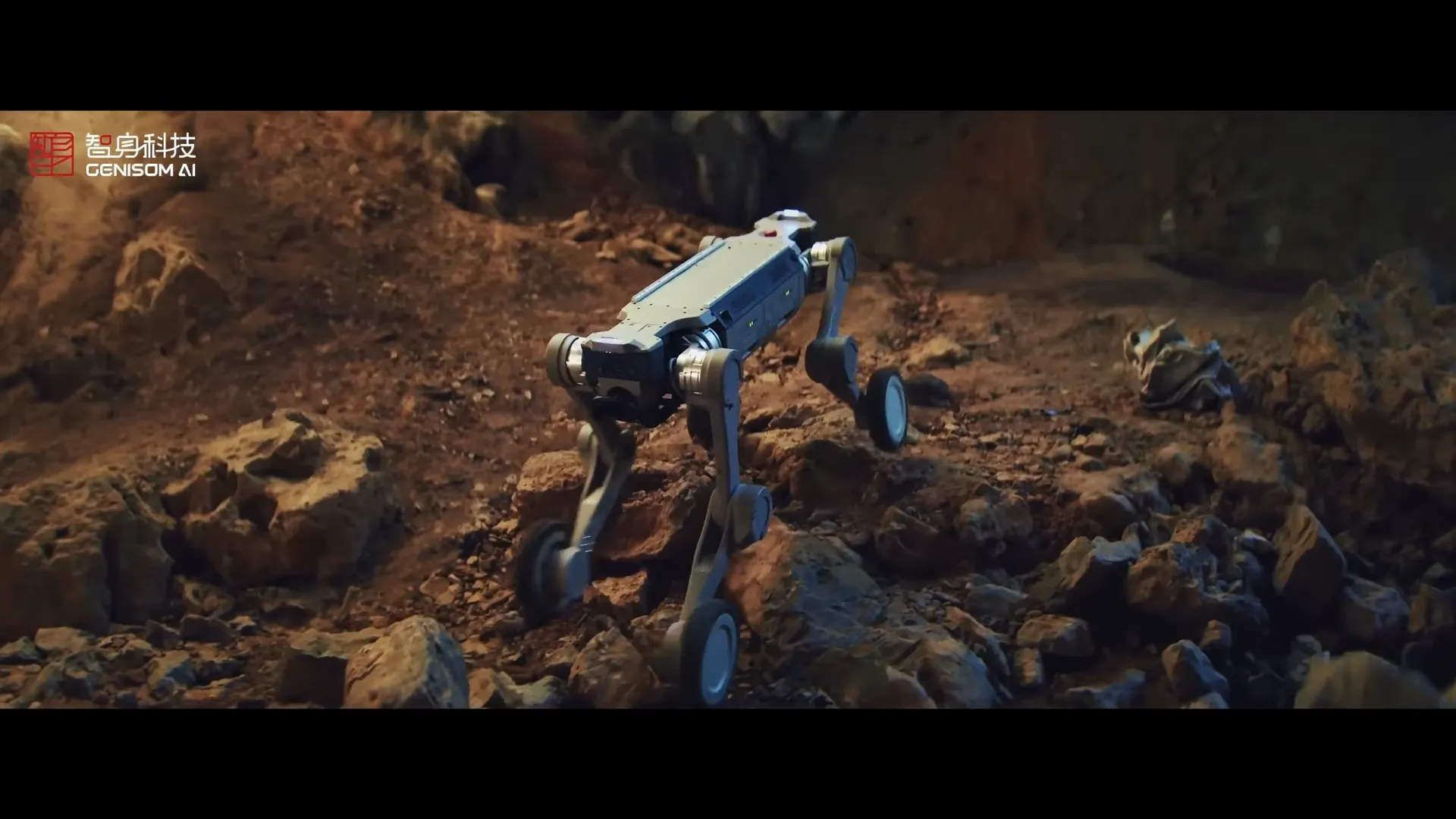
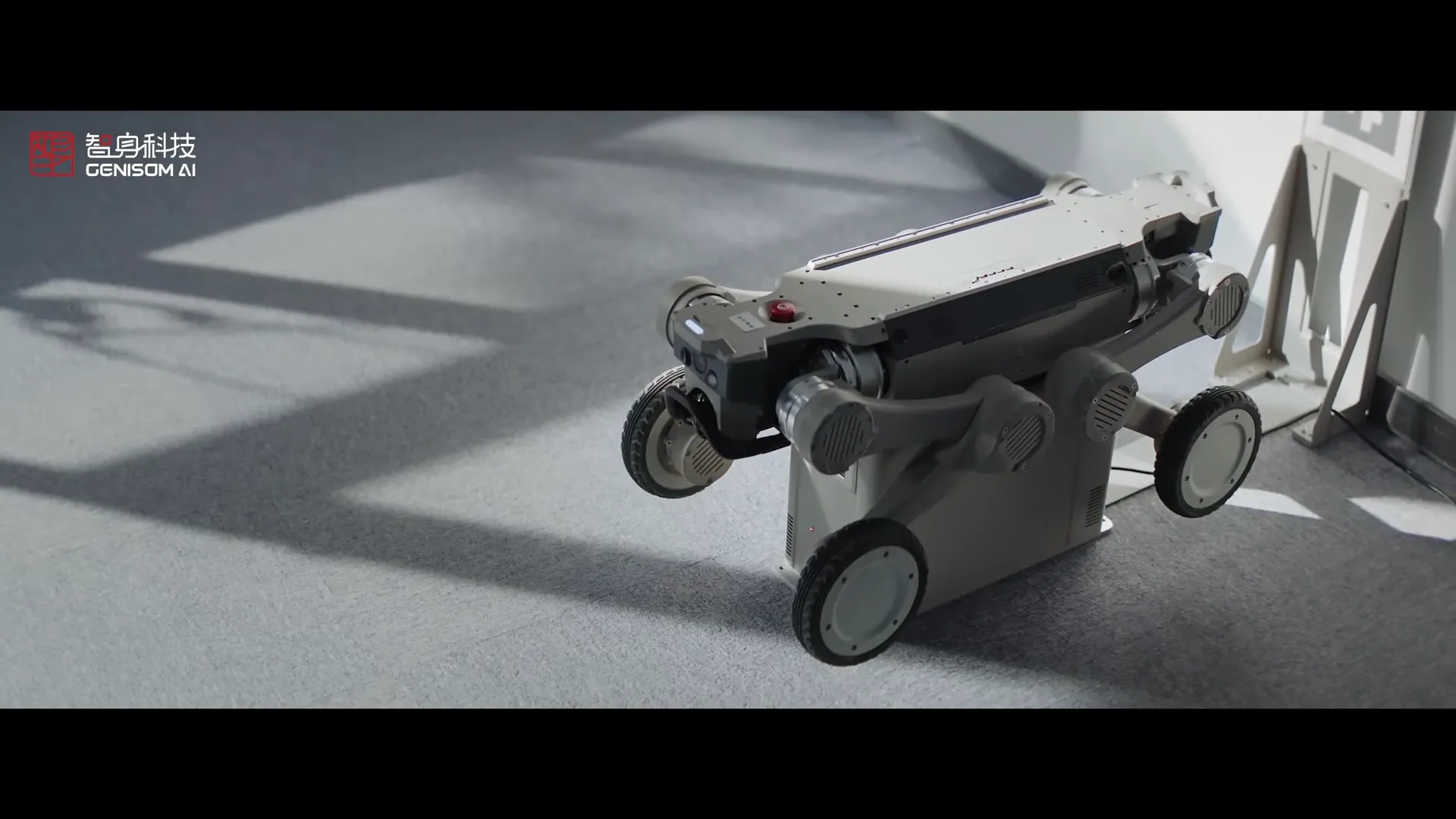
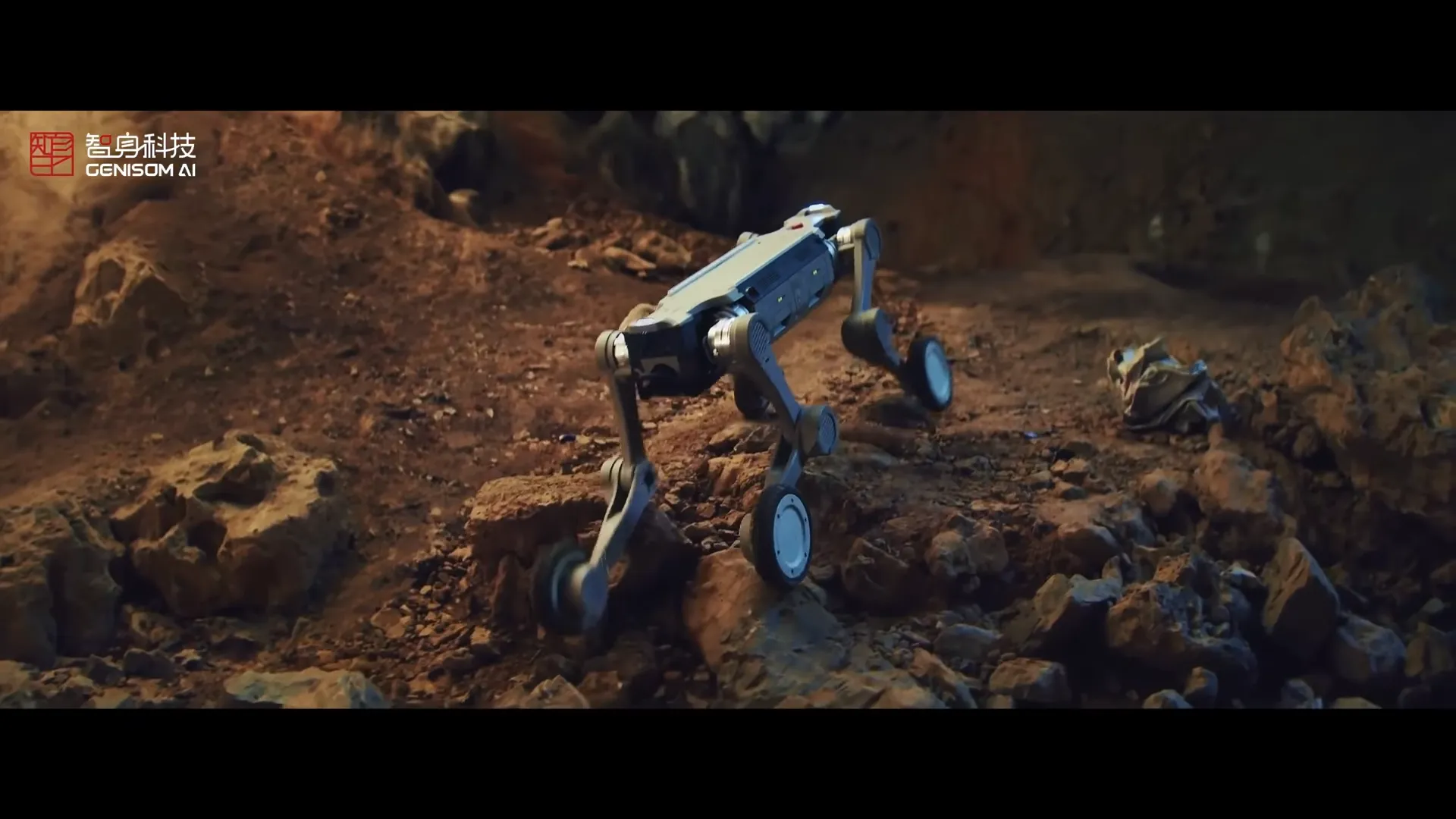
Genisom M1 is a high-payload industrial quadruped developed by GENISOM AI, engineered to combine the advantages of legged robots with efficient wheeled locomotion. It features a wheel-leg hybrid mobility system — meaning each leg can act in both stepping (legged) and rolling (wheeled) modes to optimize traversal on varied terrain. This allows efficient rapid movement on flat surfaces while retaining the ability to step over obstacles up to ~80 cm high or climb slopes up to ±45°, giving the M1 versatility for industrial, outdoor, and challenging terrain operations.
The M1’s modular mechanical architecture comprises 16 degrees of freedom (DOF) — typically a 3+1 arrangement per leg — allowing coordinated motion for stepping, crawling, and balanced locomotion. Its high payload ratio (approximately a 1:1 payload-to-weight capability) places it ahead of many similar platforms; quoted specs show it can carry ≥25 kg of stable payload while weighing ≤40 kg total with battery.
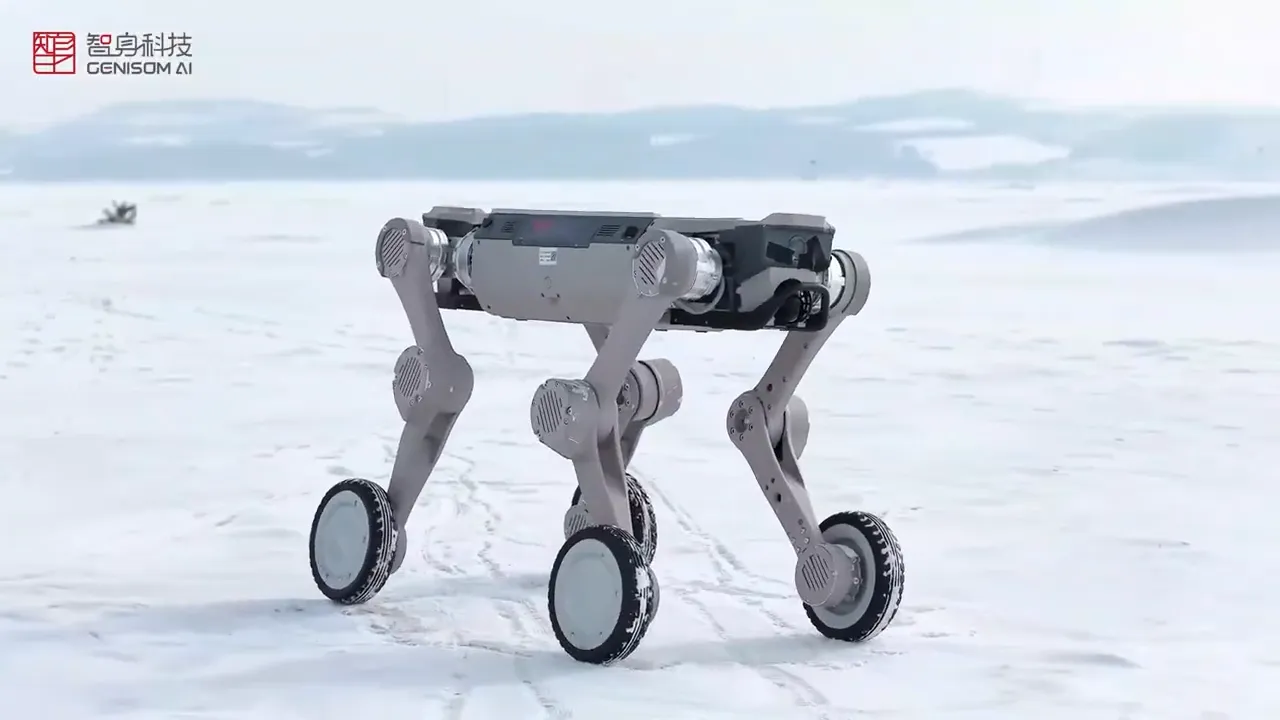
Built for real environments, the robot is rated IP67, meaning it is dust-tight and capable of brief submersion — a rare capability in industrial quadrupeds — and can operate across a wide temperature spectrum from −20 °C to 55 °C. Dual hot-swappable batteries provide continuous runtime (often ≥3.5 h under load) and allow uninterrupted missions.
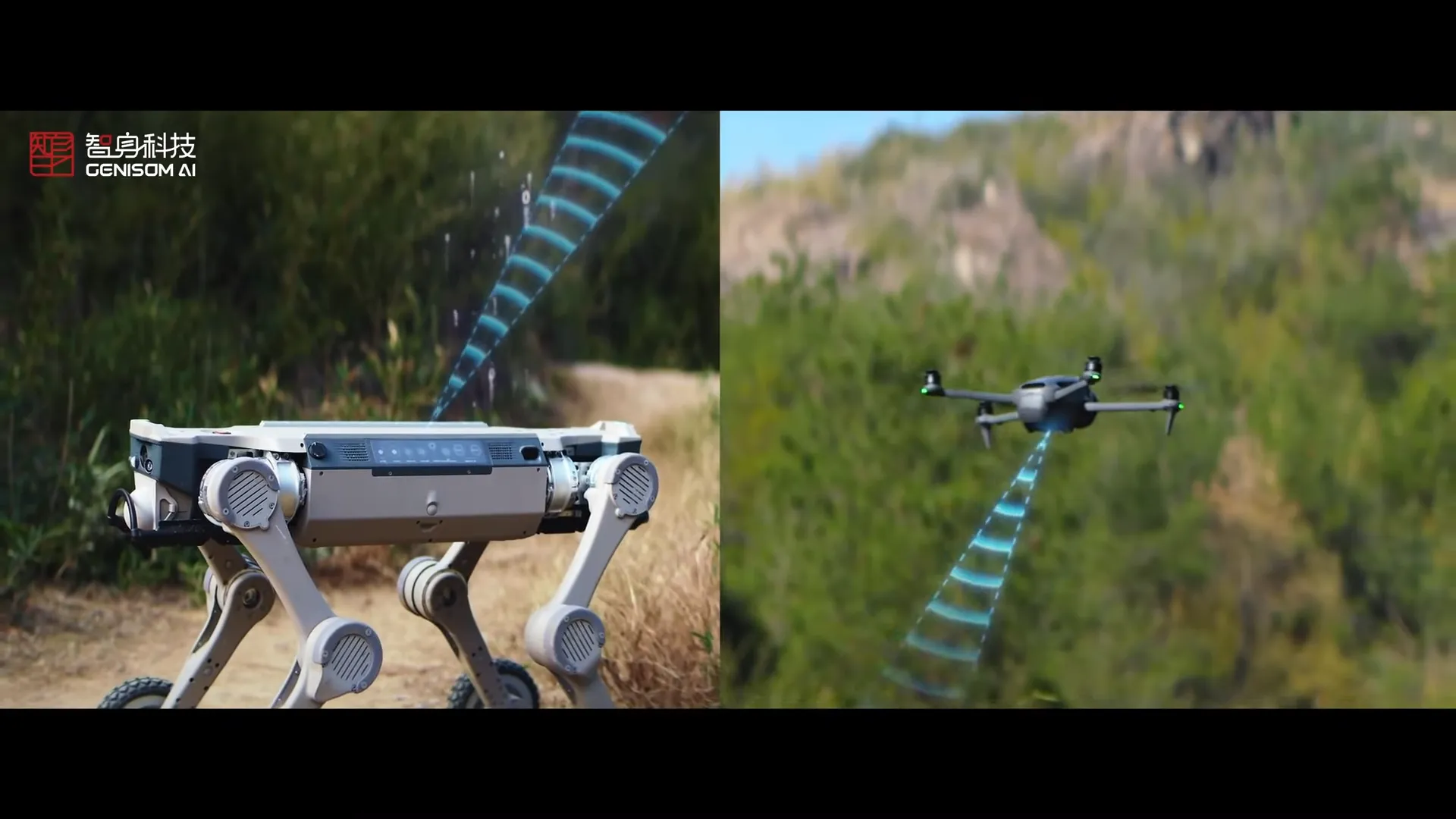
The perception stack features front & rear 96-line LiDAR, FPV wide-angle cameras, ultrasonic sensors, and optional RTK GNSS for precise outdoor positioning. These sensors support 360° situational awareness, obstacle avoidance, and environment mapping. Multiple wired and wireless communication options (Gigabit Ethernet, USB, Wi-Fi, Bluetooth, RF) make the platform suitable for local teleoperation or supervised autonomy.