





Intro
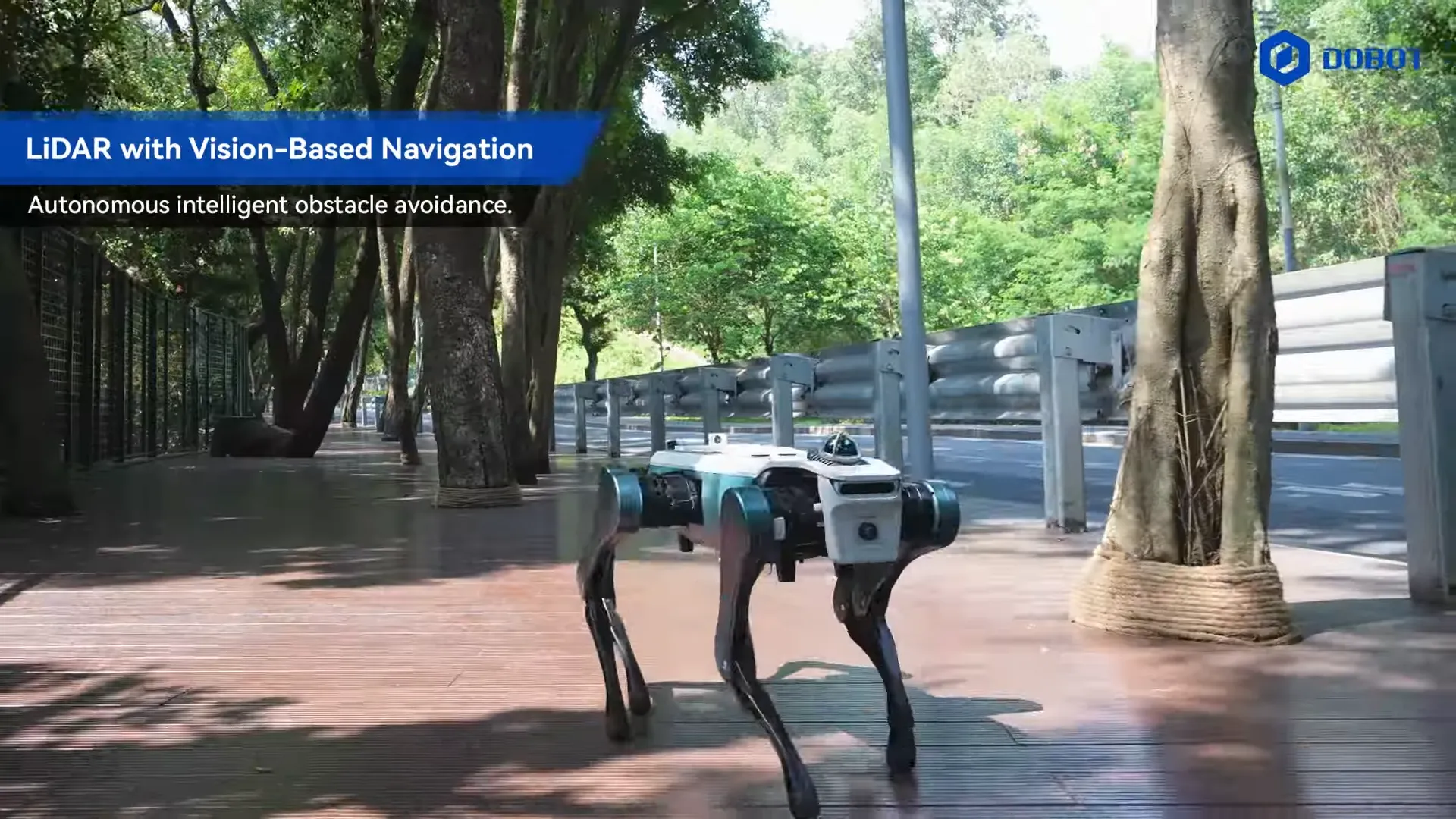
The Dobot Hexplorer is a bio-inspired hexapod robot engineered for high stability, adaptability, and modular use across a variety of environments. Its six-leg configuration uses a tripod gait that maintains three legs on the ground at all times, providing exceptional balance and anti-tip performance even on slippery, uneven, or narrow surfaces.
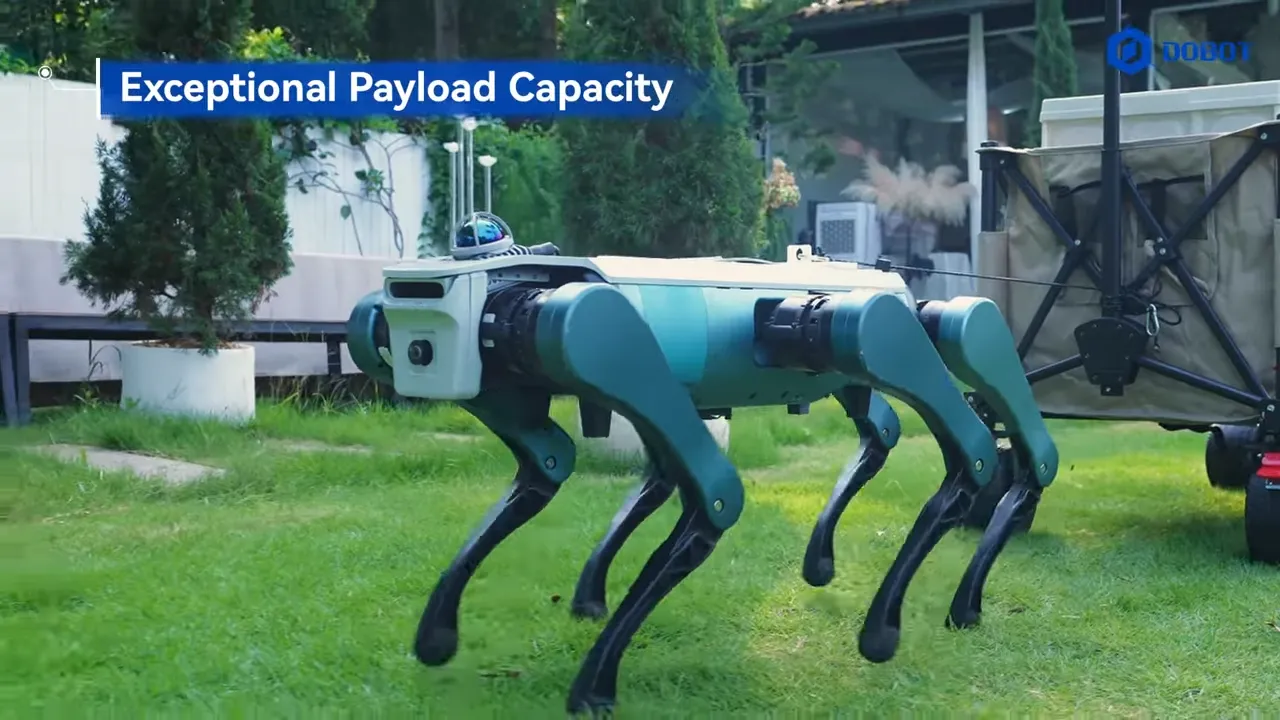
The lightweight yet strong structure supports rated payloads of 10 kg (with up to 15 kg max) and can pull loads several times its own weight. Built with advanced joint mechanisms and torque motors (peak torque 33 Nm), Hexplorer integrates an x86_64 control architecture (Intel Core i7/i5) with ROS2-compatible SDKs and real-time sensor feedback, allowing developers to customize gait, terrain sensing, and AI behaviors. Sensors include IMU and motor encoders with support for optional LiDAR/depth cameras and external modules. It offers quiet operation (≤55 dB) and IDE/SDK support for motion planning and control.