


Intro
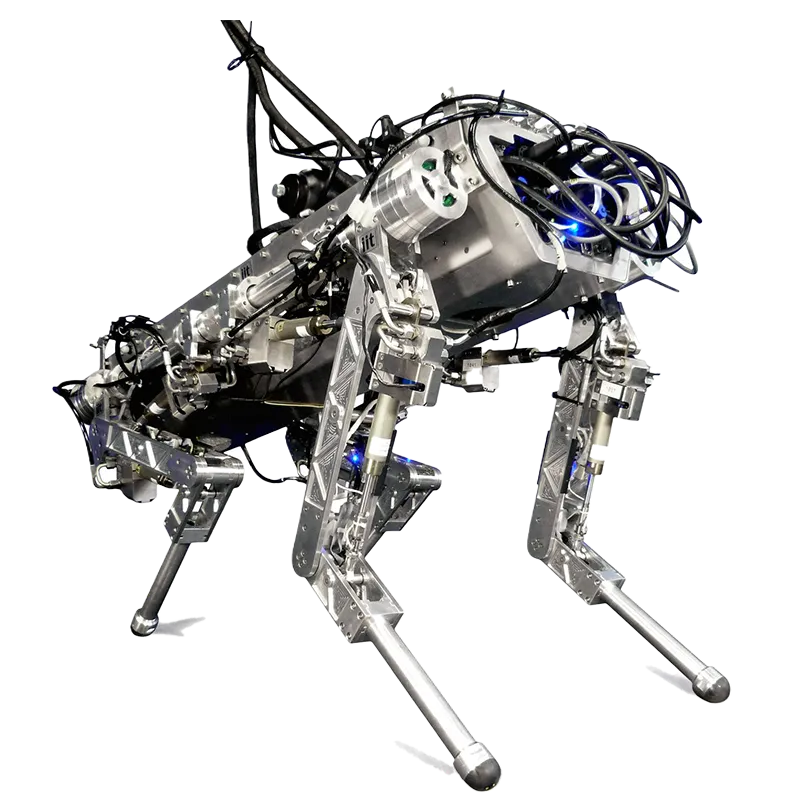
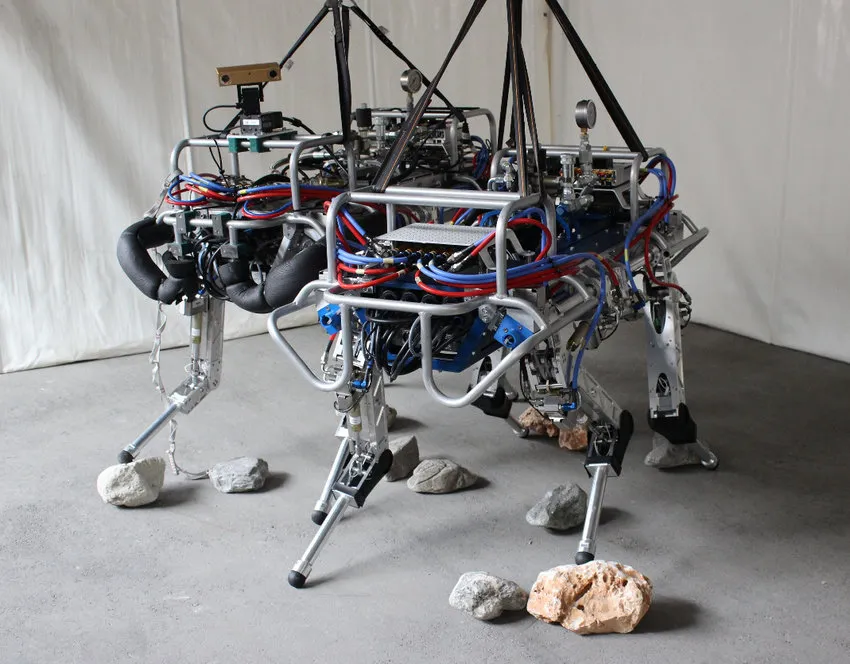
HyQ measures approximately 1.0 m (L) x 0.5 m (W) x 0.98 m (H) and weighs about 70 kg (tethered version) or 100 kg (with onboard hydraulics and battery). It features 12 active degrees of freedom with 3 actuated joints per leg powered by a combination of hydraulic servovalves and brushless DC motors with harmonic drives. The robot has a robust mechanical design with aluminum alloy and stainless steel structure to withstand demanding operational conditions. Its sensing suite comprises stereo cameras, laser rangefinders, inertial measurement units (IMU), load cells in joints, and joint encoders. The onboard control computes real-time locomotion control under a Linux real-time OS offering highly precise and adaptable movements.