








Intro
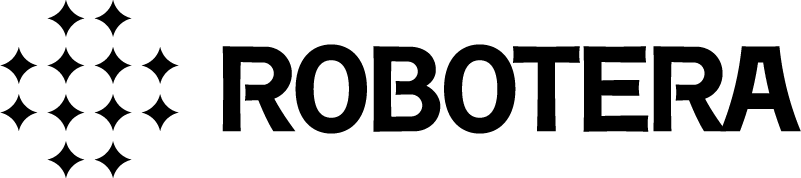
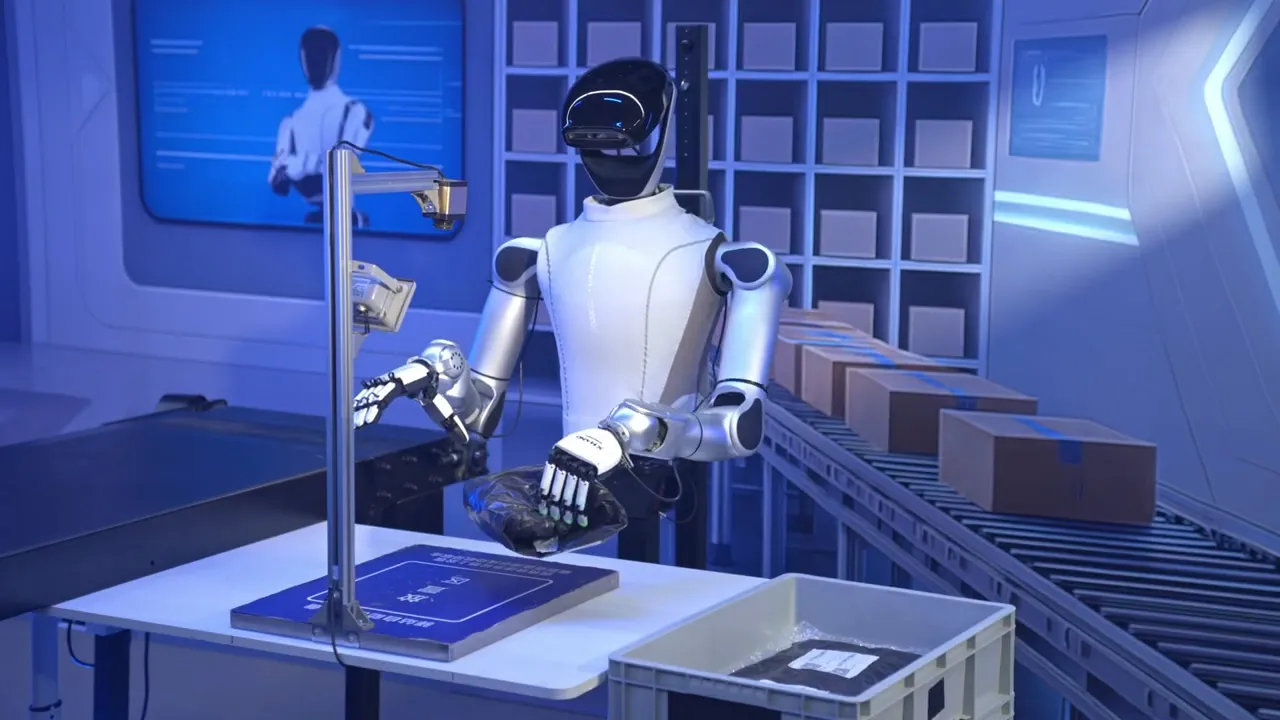
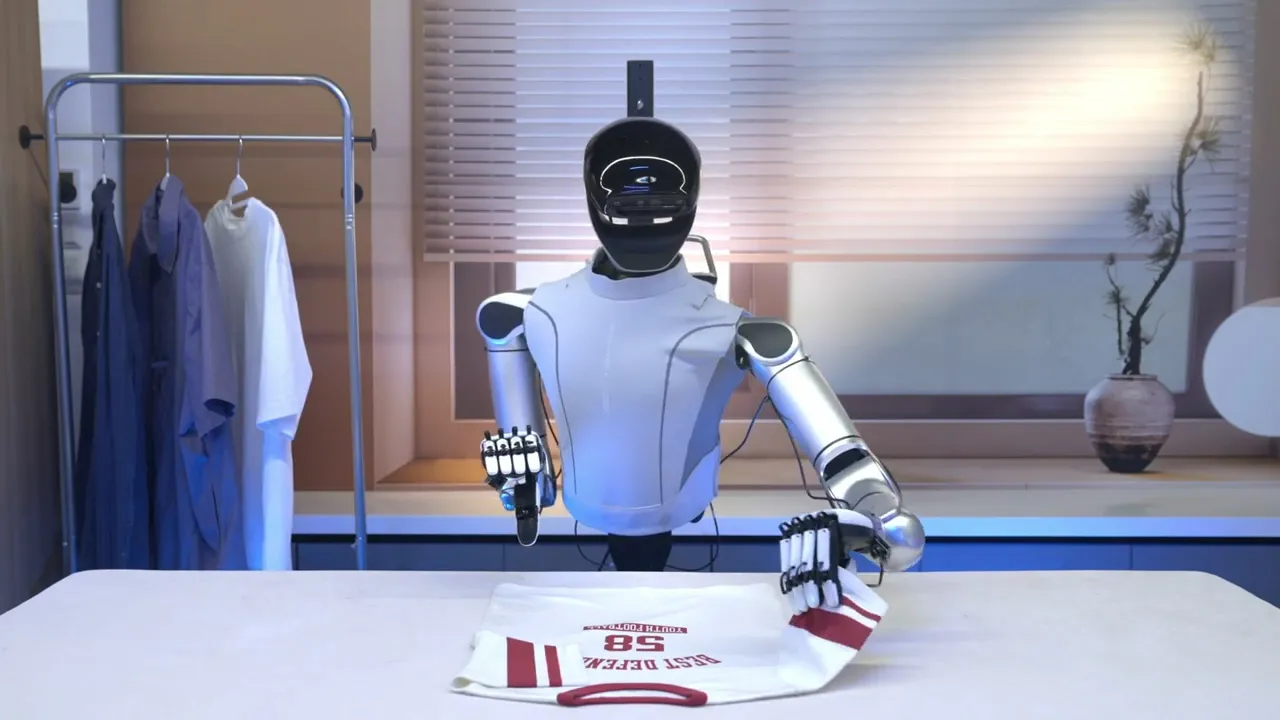
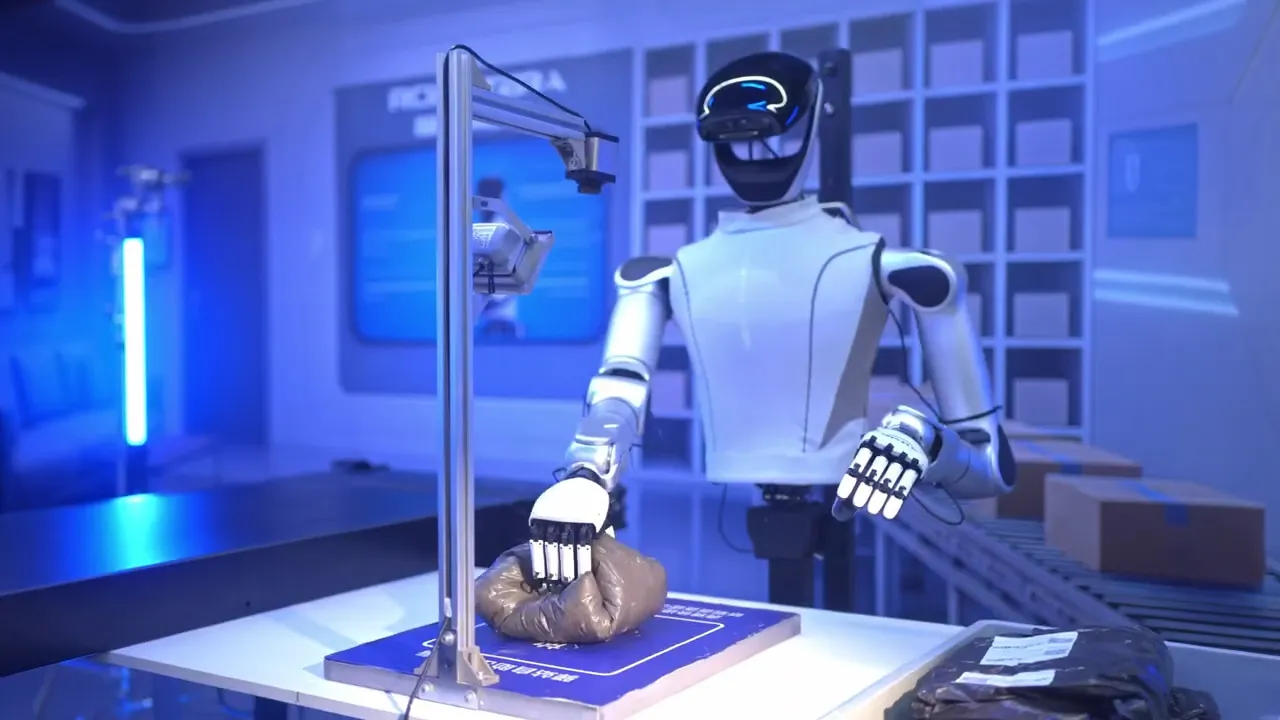
The L7 humanoid features 55 degrees of freedom across its entire body, with joint motors generating up to 400 Nm torque at 25 rad/s for fast and powerful limb actuation. It integrates advanced joint-level sensing and control to precisely coordinate complex movements while maintaining balance. The robot’s multisensor fusion system uses panoramic cameras, depth sensors, and real-time positional feedback to achieve 360° spatial perception. Its interchangeable battery system supports operational flexibility. The combined hardware and embedded AI software architecture enables simultaneous execution of large-scale locomotion and fine motor manipulation.