








Intro
The development of the Mirokaï robot is driven by a comprehensive dual mandate:
- optimizing logistical effieciency in critical social settings
- emotional support and companionship within those same environments.
Core Development Objectives
Mirokaï primary function objective is to serve as an assistant, alleviating the logistical burden on essential human staff, particularly nurses in complex environments like hospitals. By autonomously handling the transport of light supplies and equipment, the robot enables human caregivers to reallocate valuable time toward direct, enhanced patient care.
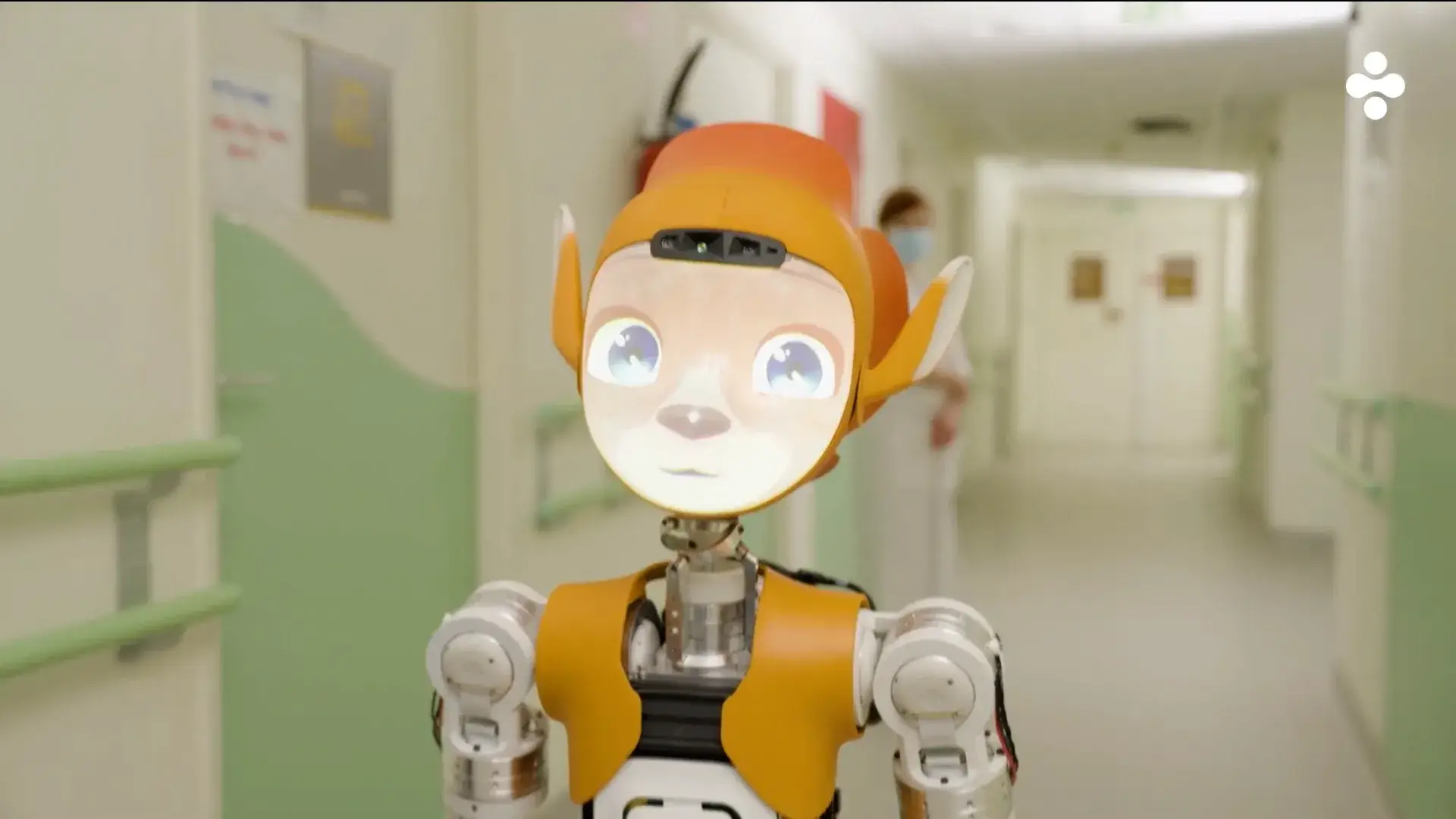
Simultaneously, the platform serves a crucial social function focused on emotional upliftment and companionship. Enchanted Tools, co-founded by Jérôme Monceaux, who previously co-founded Aldebaran Robotics (developers of Nao and Pepper) , emphasizes mitigating feelings of isolation, loneliness, and anxiety common among long-term residents or patients. This objective has led to its deployment in sensitive settings, such as offering emotional support in a pediatric radiotherapy department.
Aesthetics and Dimensions
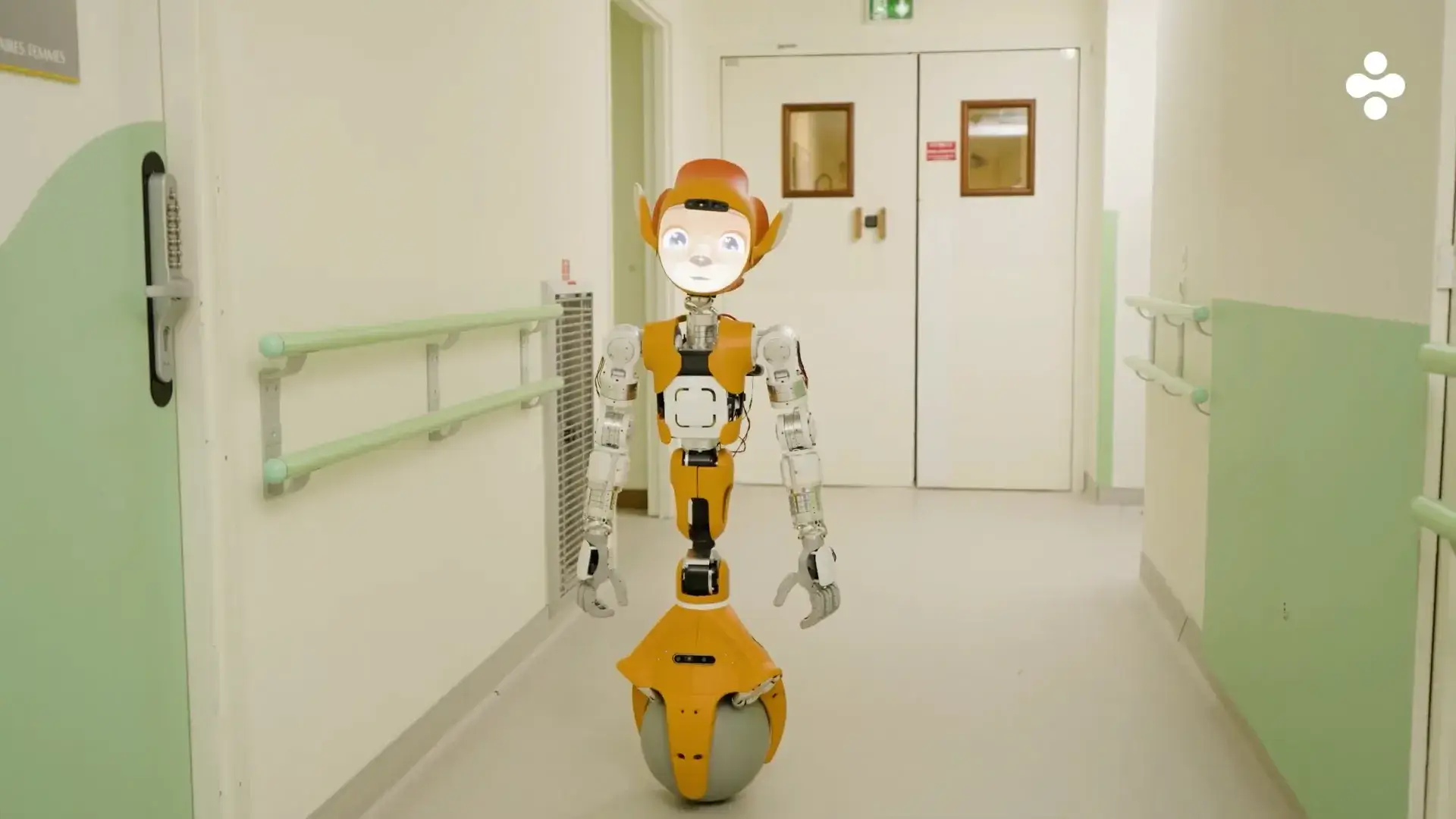
The robot’s aesthetics are fundamental to its market strategy, utilizing a captivating, anime-inspired design that aids in positive user perception. Its height of 123 cm places its sensors and face at a suitable interacting level for both standing adults and seated patients or children, promoting effective HRI. Its low mass (29 kg to 30 kg) and the primary structural material, Aluminium , contribute to its high safety rating ("Safe with humans: Yes" ), minimizing kinetic energy hazards in close-quarters operations.
Manipulation Systems
Mirokaï features highly specialized manipulation hardware, including 8 fingers across two hands. These hands are designed with "connected handles and opposable thumbs". This architecture is optimized not for general-purpose high dexterity, but for the secure and reliable gripping of standardized objects and specific containers relevant to hospital and hospitality environments (e.g., trays, medical equipment). The simplicity of the hand articulation is confirmed by its low hand DOF count, which is only 2.
Locomotive System
The most radical design element is the reliance on a rolling globe mechanism instead of bipedal walking. This grants the robot superior mobility in complex indoor layouts, allowing swift, omnidirectional movement necessary for efficient light logistical tasks (1.5 kg payload capacity) in confined spaces.