












Intro
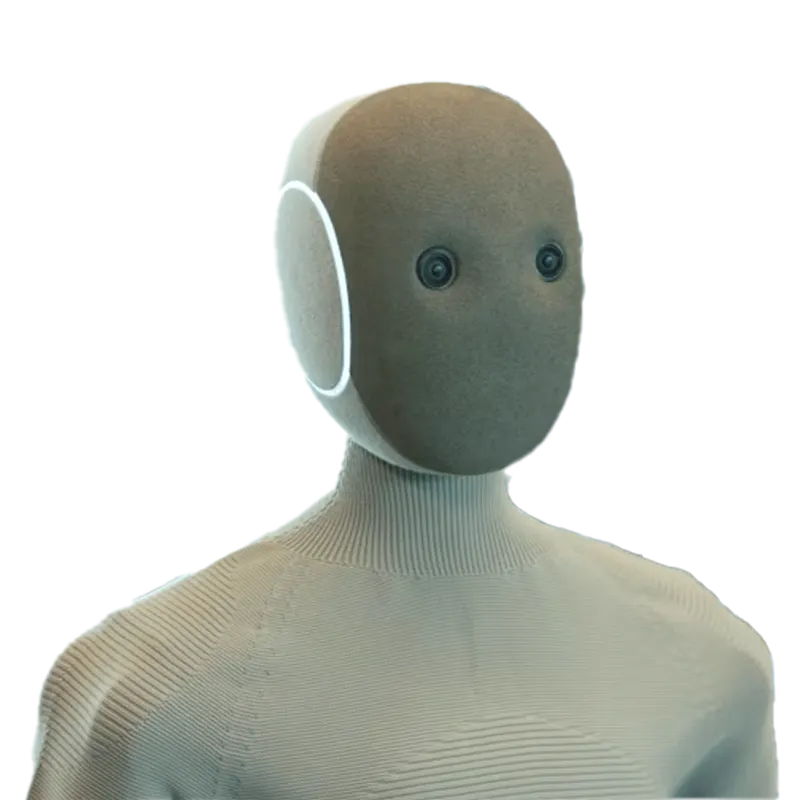
NEO stands 1,670 mm tall and weighs 30 kg, making it significantly lighter than most comparable bipedal humanoids. Its exterior is wrapped in a custom 3D lattice polymer shell that cushions external contact, and all joint surfaces are covered to be fully pinch-proof. The robot's machine-washable knit suit and nylon shoes are 3D-printed from durable nylon, and visual status indicators are provided through LED-based Emotive Ear Rings that communicate battery level, attention state, and operational status. The entire system operates at a measured 22 dB during normal activity. NEO's total 75 degrees of freedom are distributed across the full body, with 22 DoF per hand providing human-level grasping capability. Fingers can actuate at up to 8 m/s. The robot can lift up to approximately 70 kg and sustain a per-arm payload of approximately 8 kg for everyday manipulation tasks. Each arm supports approximately 8 kg in extended configurations.
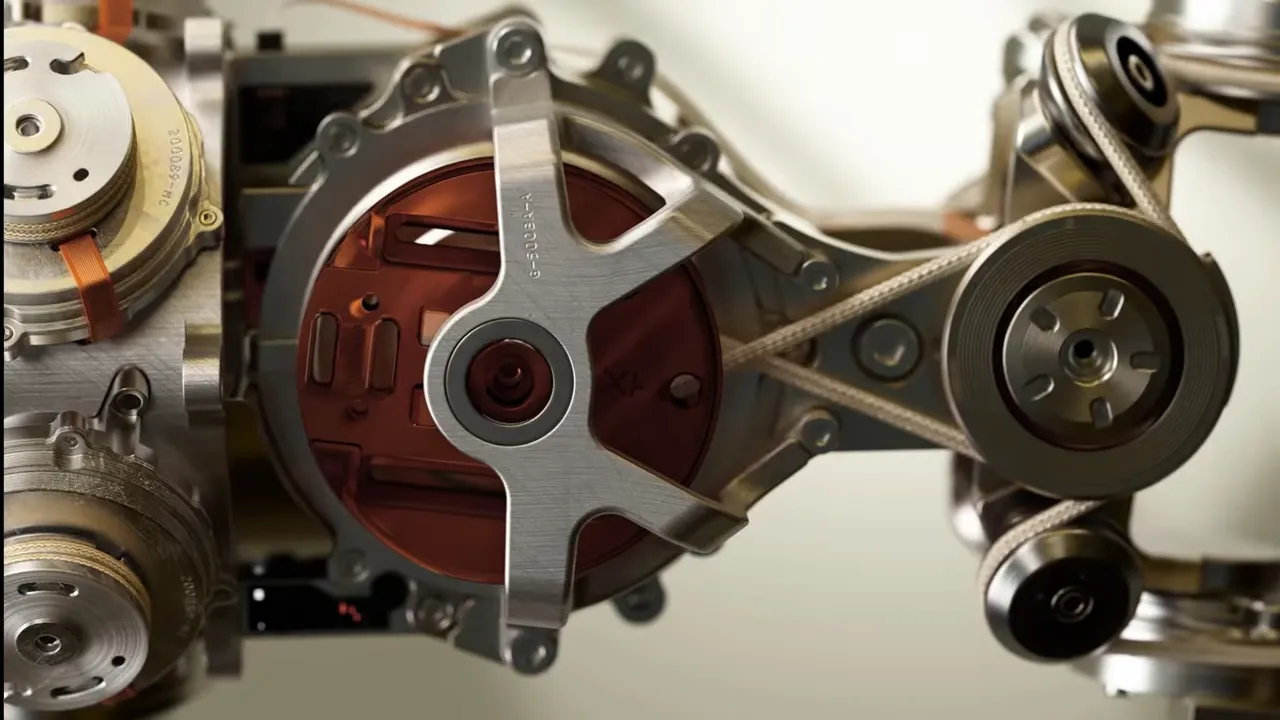
All joints are driven by 1X's proprietary Tendon Drive system, which uses high torque-density Revo1 brushless DC motors paired with flexible polymer tendon-based transmissions delivering 95% backdrivability.mn This produces compliant, smooth, and quiet actuation suited for safe interaction with people and fragile objects. The robot navigates stairs, sits, kneels, lies down, and recovers to standing using the Redwood Mobility controller. Navigation is vision-only, using dual 8.85 MP 90 Hz stereo fisheye cameras with no LiDAR. Compute is provided by an NVIDIA Jetson Thor module delivering up to 2,070 FP4 TFLOPS of AI processing power, running 1X's Redwood AI vision-language-action model and an onboard LLM for natural language processing. Battery life is approximately 240 minutes (4 hours), with autonomous self-docking for recharging.