



Intro
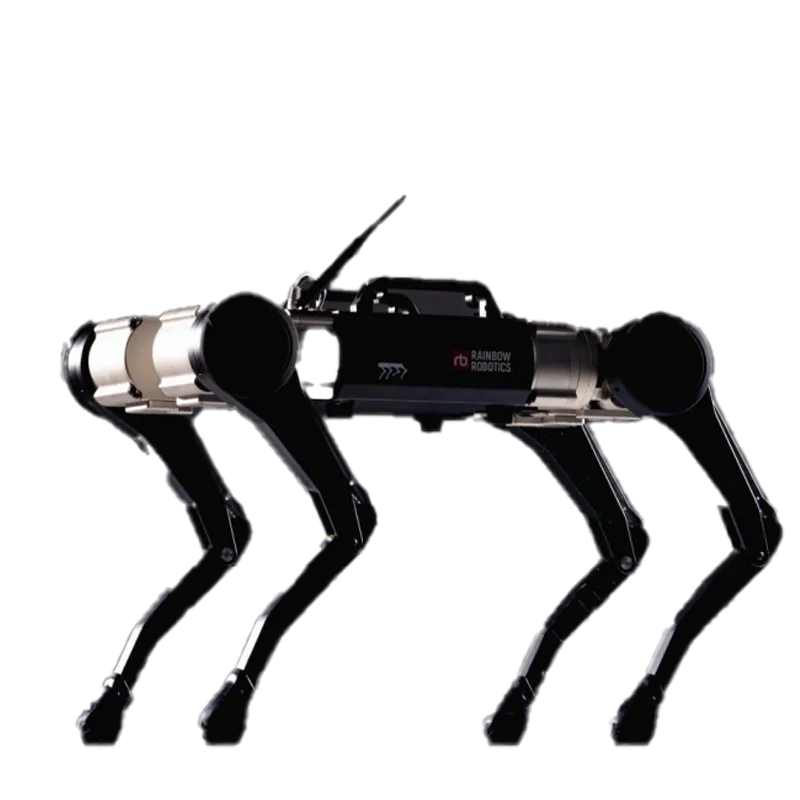
RBQ-3 is a compact, AI-enabled quadruped standing roughly 550 mm (W) × 350 mm (L) × 400 mm (H) and weighing around 25 kg. It is designed to walk and run at speeds up to approximately 7.2 km/h with a payload capacity near 3 kg to mount sensors and mission equipment. Its power system supports up to 3 hours of continuous operation. The robot utilizes multiple high-precision sensors such as LiDAR, RGB cameras, and stereo depth cameras to perceive and map its environment reliably for navigation and task execution. Communication is wireless via Wi-Fi using UDP protocols for command input. The design supports agility in complex terrains by adjusting its gait to overcome step differences up to several centimeters and climbing slopes with adaptable posture control.