















Intro
The TRON 2 is a multi-form embodied robotic platform featuring an aluminum alloy and plastic body with modular mechanical and electrical systems. It combines modularity, mobility, and manipulation within a unified hardware ecosystem. Its Tri-Form configuration allows researchers to reconfigure the robot’s structure into three core forms:
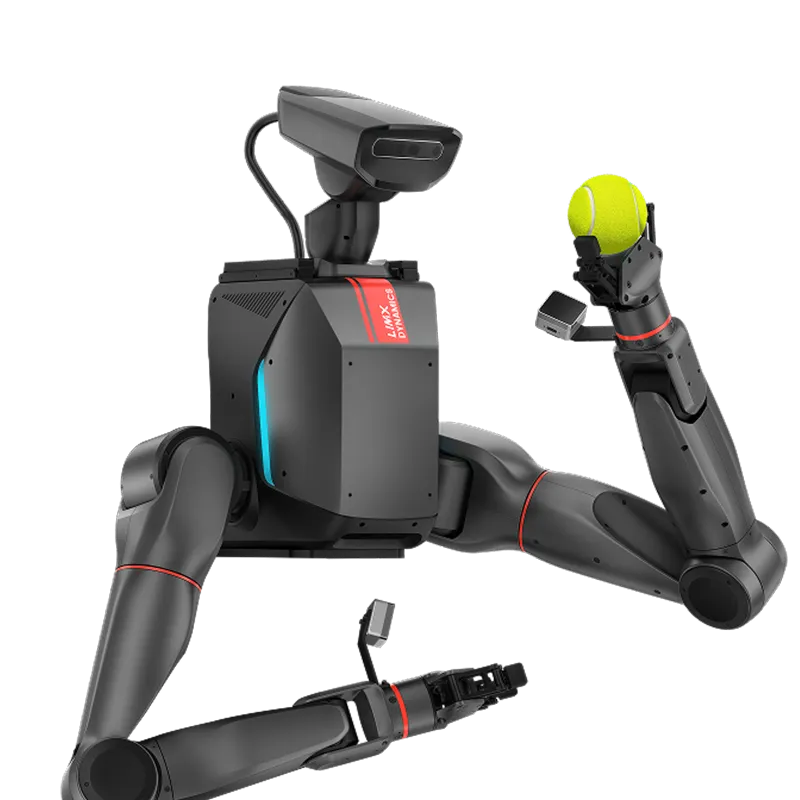
- Dual-Arm:
A stationary configuration with two 7-DoF arms (70 cm reach, spherical human-like wrists) capable of 5–10 kg total payload for desktop tasks. Each arm has 7 DoF and a 70 cm reach, offering a ±0.5 mm repeat positioning accuracy across a 5 m/s end-effector speed and a 36 m/s² acceleration envelope. - Bipedal:
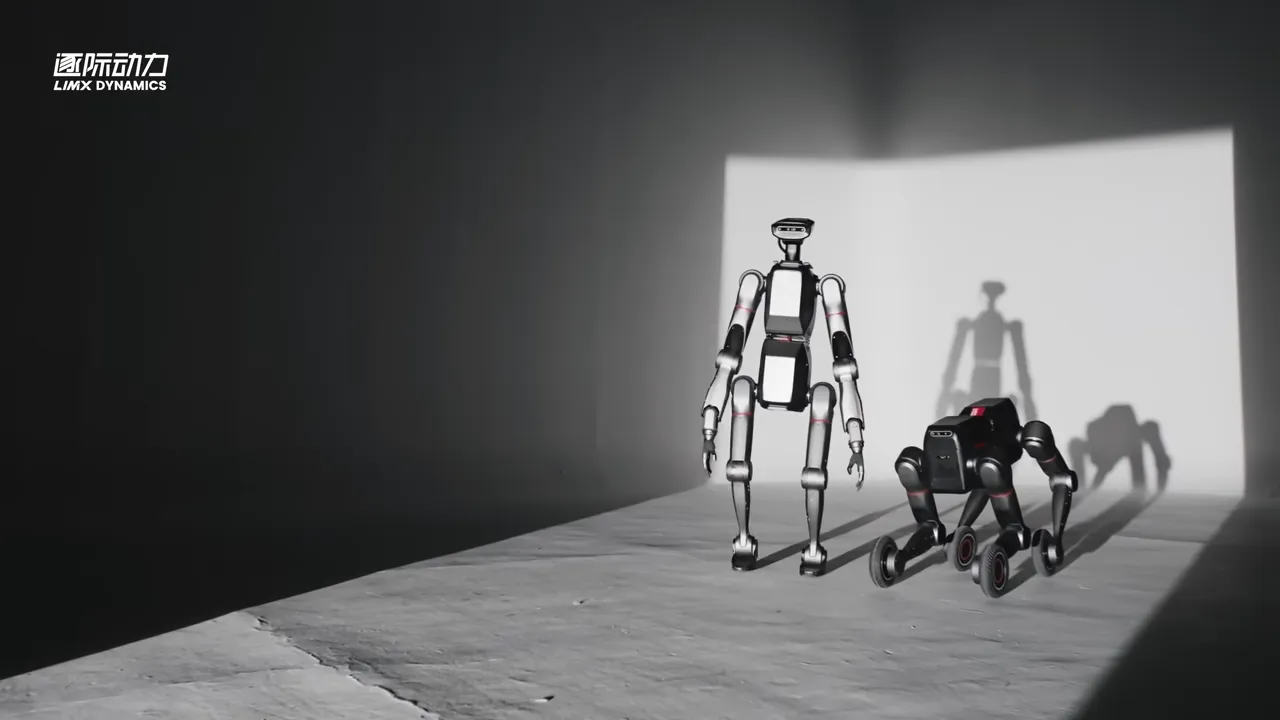
Legged mode featuring automatic motion planning using visual inputs, stair climbing, and terrain adaptability with step height capacity 20 cm. - Wheeled:
Hybrid mobility setup that combines wheel speed with leg articulation, achieving speeds of 3–5 m/s and supporting up to 30 kg payloads when walking on a flat ground and 20 kg payloads when climbing stairs.
Electrical systems include a 46.8 V ternary lithium battery with hot-swap support, up to 2.8 kW peak output, and charging that reaches 20–80% in 30 min (100% in ~54 min).The robot is designed as both a hardware substrate for embodied AI experimentation and a research-ready automation tool, with open SDK support (Python, ROS1/ROS2 and C++), preloaded tutorials, and Sim2Real middleware to accelerate development. It also supports multiple perception modules (vision, voice, etc.) to enable multimodal interaction and AI-driven control.