








Intro
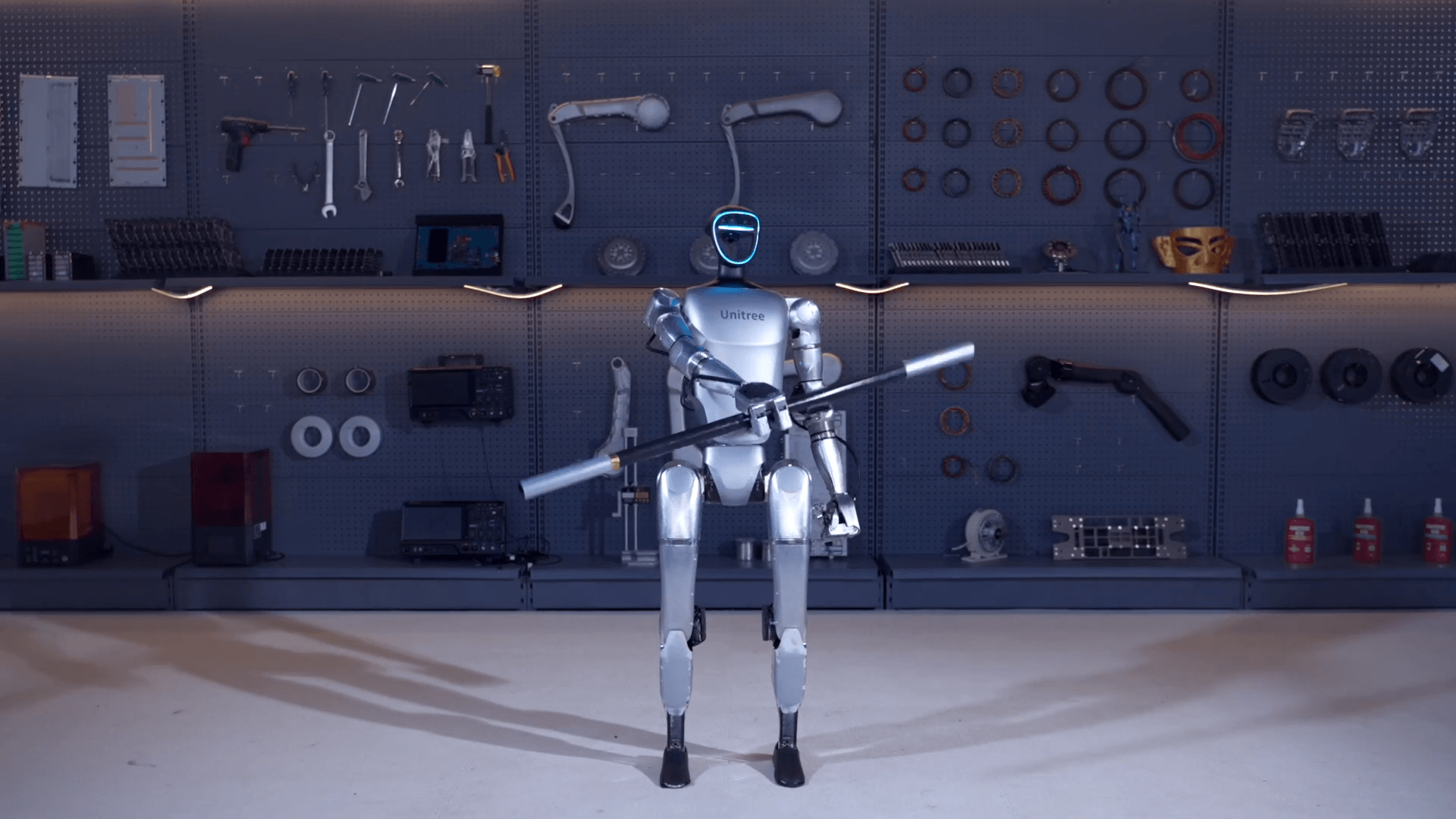
Unitree G1 stands 1320 mm tall, 450 mm wide, and 200 mm thick when standing. It folds compactly to 690 x 450 x 300 mm for transport. The robot weighs approximately 35 kg and features 23 to 43 joint motors depending on the model. Legs have 6 DOF, waist 1 DOF (3 DOF in EDU versions), and arms 5 DOF (7 DOF in EDU versions). The G1’s hands can optionally include Dex3-1 force-controlled dexterous hands for advanced manipulation. It is equipped with Intel RealSense D435 depth camera and Livox MID360 LiDAR for comprehensive 360° perception. Powered by a 9000 mAh lithium battery, it offers around 2 hours of operation. The robot runs on a high-performance 8-core CPU, with the EDU version optionally including an NVIDIA Jetson Orin AI module. It supports Wi-Fi 6 and Bluetooth 5.2 for connectivity and OTA firmware updates.