



Intro
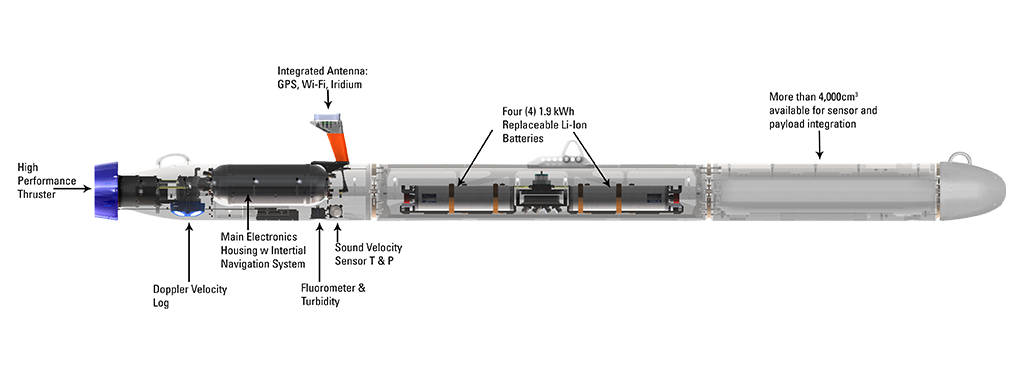
The Bluefin-12 is a modular, medium-class autonomous underwater vehicle developed to provide robust subsea data collection across defense, scientific, and industrial operations. It measures approximately 4.83 m in length and 0.32 m in diameter with a rated depth of 200 m, making it suitable for littoral and near-shore missions.
Built on a modular architecture with over 4,000 cm³ of internal payload space, Bluefin-12 can integrate a wide range of sensors and payloads, including side-scan sonar, forward-looking sonar (FLS), machine-vision cameras, environmental sensors, and specialized mission kits. This extensibility enables operators to tailor the UUV for hydrographic surveys, route reconnaissance, water quality monitoring, or ISR tasks.
Navigation combines a high-performance Doppler Velocity Log (DVL) and Inertial Navigation System (INS) to achieve precise positioning with ≤0.1% distance traveled (D.T.) CEP 50 accuracy, ensuring geo-referenced data collection. Optional forward-looking sonar enables terrain following and collision avoidance, enhancing autonomous mission safety.
The Bluefin-12’s modular free-flooded design allows quick removal and replacement of batteries and the 1 TB Removable Data Storage Module (RDSM), minimizing turnaround time between missions. A suite of onboard processing capabilities ensures rapid access to actionable data once the vehicle is recovered.