Intro
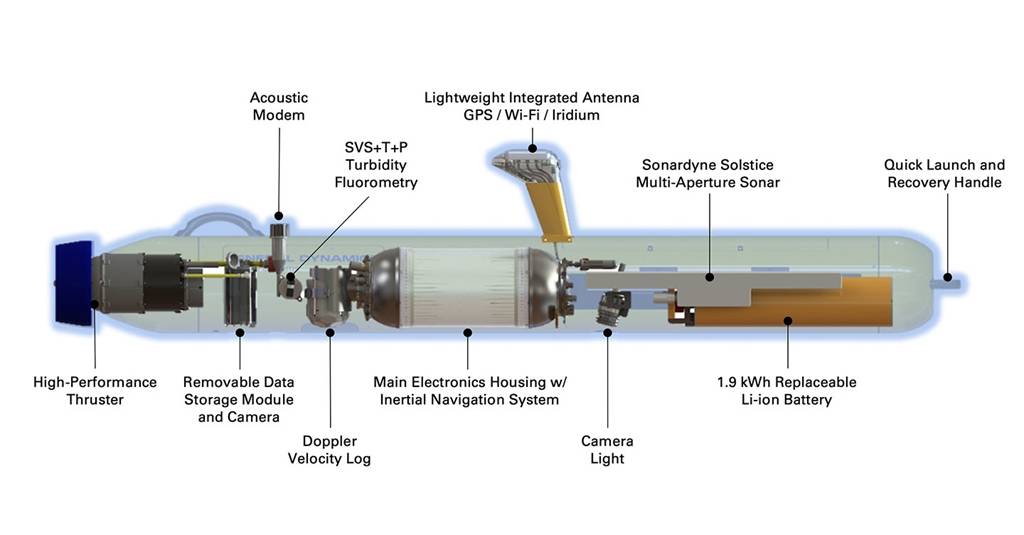
The Bluefin-9 is an autonomous unmanned underwater vehicle engineered for portable, high-fidelity subsea missions. Its carbon fiber body houses an integrated suite of advanced sensors—most notably the Sonardyne Solstice Multi-Aperture Sonar (MAS), which delivers high-contrast, undistorted side-scan imagery across a ~200 m swath with ultra-high resolution comparable to larger synthetic aperture systems.
Navigation is achieved through a combination of Nortek Doppler Velocity Log (DVL), Inertial Navigation System (INS), and other onboard sensors to provide precise, geo-referenced data with approximately 0.3% dead-reckoning error. This enables the vehicle to autonomously follow missions and return high-accuracy bathymetric and environmental information.
The vehicle features modular design elements, including a removable 1.9 kWh lithium-ion battery and a 1 TB Removable Data Storage Module (RDSM), which can be swapped and accessed in the field in under ~30 minutes, dramatically reducing turnaround time between missions. Onboard processing allows operators to retrieve mission-ready data—sonar, camera imagery, and environmental measurements immediately post-mission.
Standard sensor payloads include side-scan sonar, machine vision camera (including LED-illuminated seafloor optics), sound velocity, temperature, pressure sensors, turbidity and fluorometry instruments, and current profiling. The Bluefin-9 also integrates surface aids such as LED strobes and a radio direction-finding beacon for recovery.