




Intro
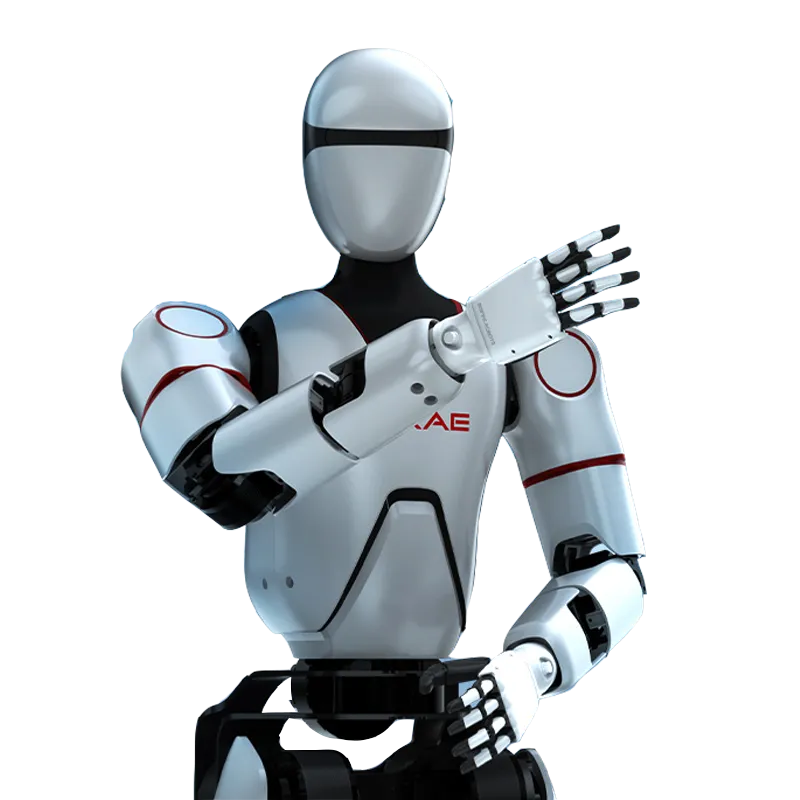
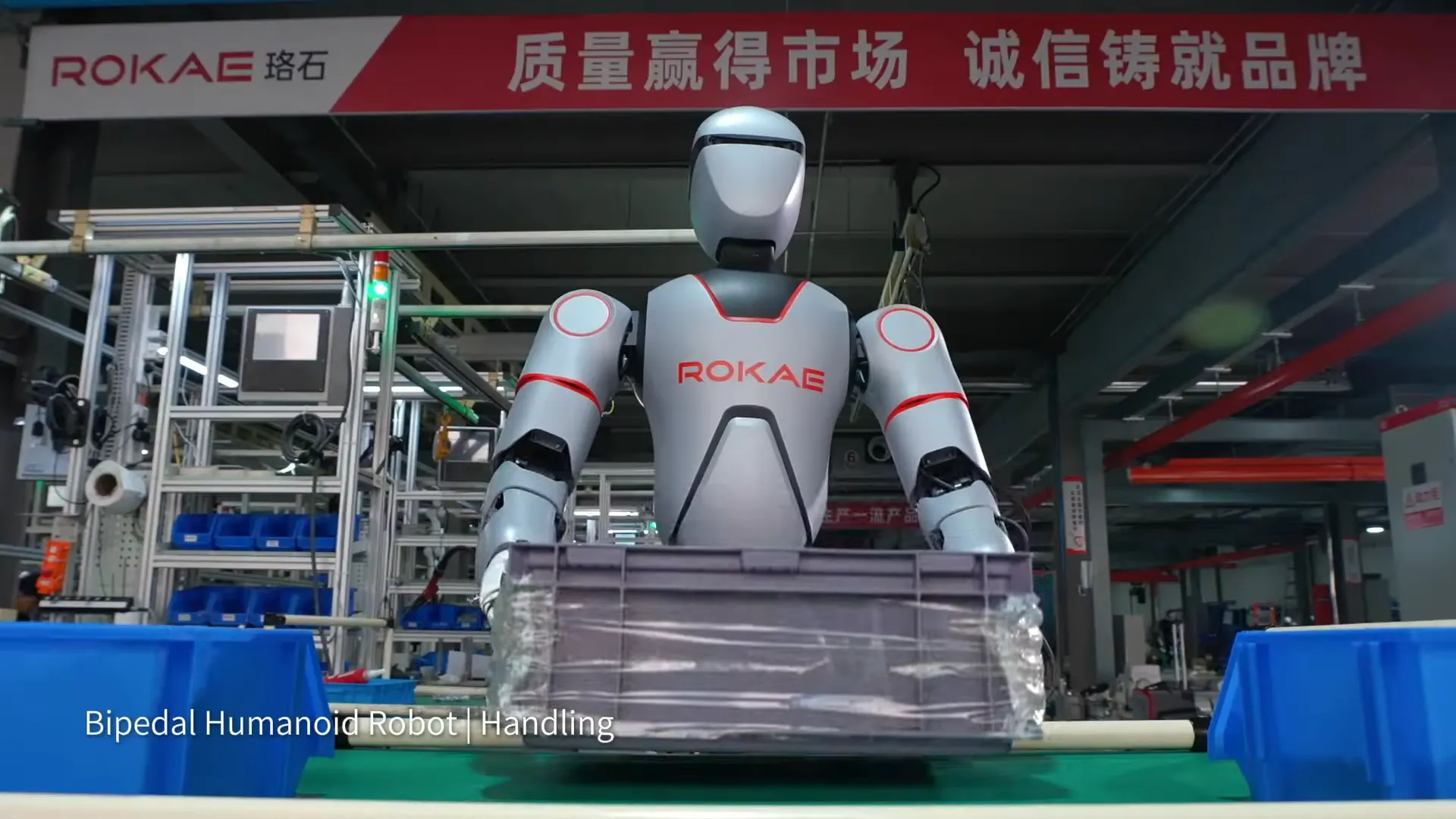
The ROKAE Human.X stands about 1.7 m tall with a weight of approximately 75 kg, making it a full-size humanoid platform capable of working in environments designed for human operators. Its hardware stack integrates rich AI technologies, an embodied intelligence engine, and multimodal perception fusion, which allows it to perform complex, human-like dynamic motion and task execution. Multimodal sensing and a large-model intelligent core enable autonomous task decomposition, real-time decision-making, and millimeter-level precision operations.
Mechanically, Human.X incorporates a high-degree-of-freedom structure with 7 DoF arms, 6 DoF legs, 2 DoF torso/waist, and 2 DoF neck, coupled with six-fingered precision manipulators capable of mimicking human grasp patterns, with a maximum grip force of 15 N, it provides flexibility in manipulation tasks. Its locomotion system supports stable walking, surface adaptation, and even stair climbing up to 15° with reliable balance control. The robot’s joint actuation and perception systems enable coordinated motion under varied environmental conditions.