





Intro
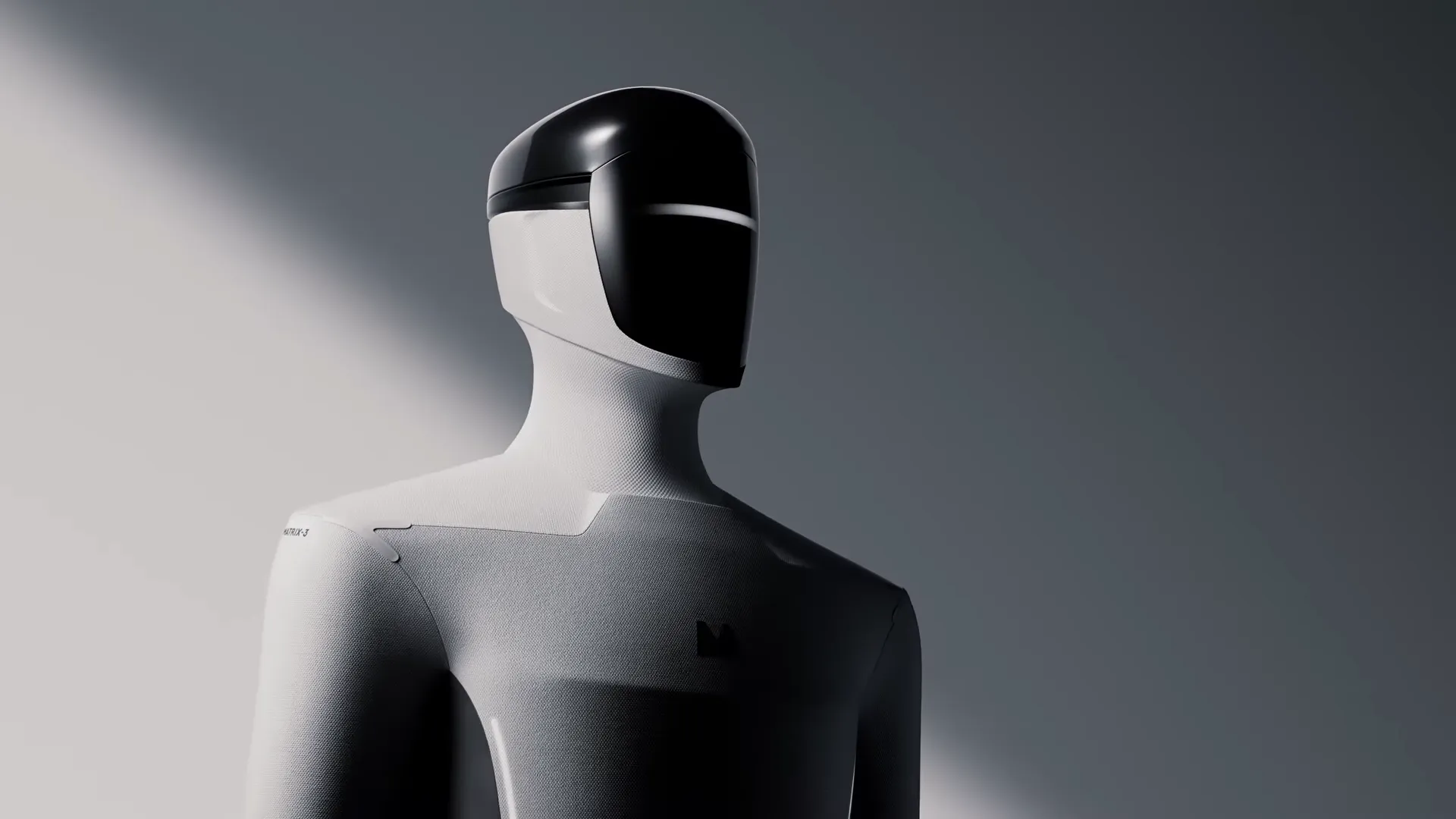
The MATRIX-3 is Matrix Robotics’ third-generation flagship humanoid robot engineered to transition from scripted industrial machines into truly autonomous, general-purpose physical intelligence agents that can operate naturally in human environments. Announced in January 2026, MATRIX-3 represents a systematic reconstruction of both hardware and software, integrating innovations in materials science, perception systems, locomotion mechanics, and foundational AI to deliver a robot capable of understanding and adapting to the physical world and human intent rather than merely executing pre-programmed sequences.
At its core, MATRIX-3’s design prioritizes safe, nuanced interaction with humans and objects. A pioneering biomimetic architecture wraps the robot in a flexible, 3D-woven skin that not only delivers a more human-centered aesthetic but also embeds high-dimensional tactile sensing across its contact surfaces. At the fingertips, a high-sensitivity tactile sensor array detects pressure as low as 0.1 N, enabling the robot to perceive even the subtlest physical interactions. This tactile intelligence is fused with an upgraded multimodal vision system powered by a large-scale spatial perception foundation model, forming a tightly coupled visual-tactile feedback loop. Together, these systems allow MATRIX-3 to judge material properties, surface geometry, and grip stability in real time, adapting force, posture, and motion dynamically to handle fragile, deformable, or flexible objects with a level of touch intuition approaching human tactile perception.
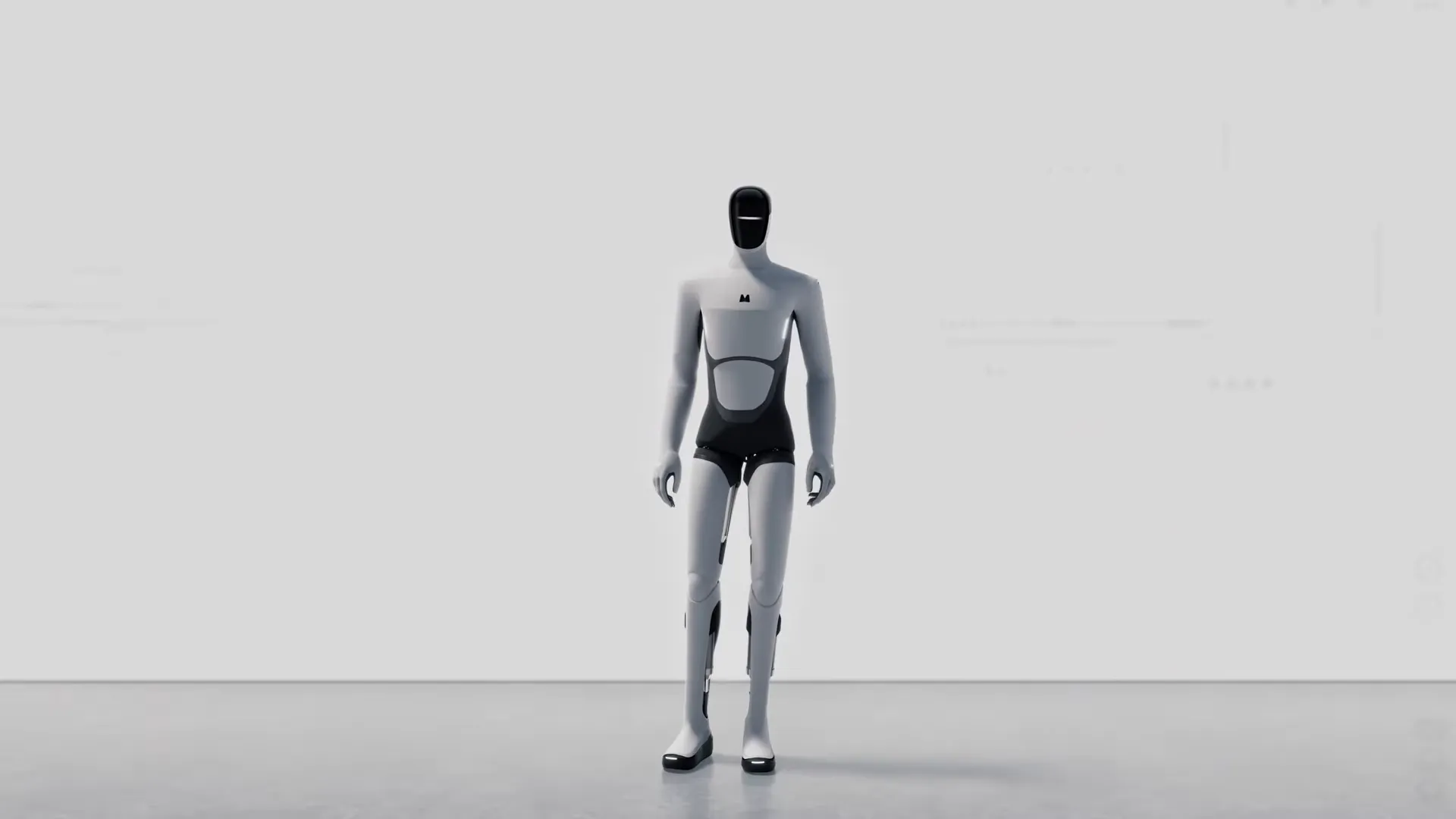
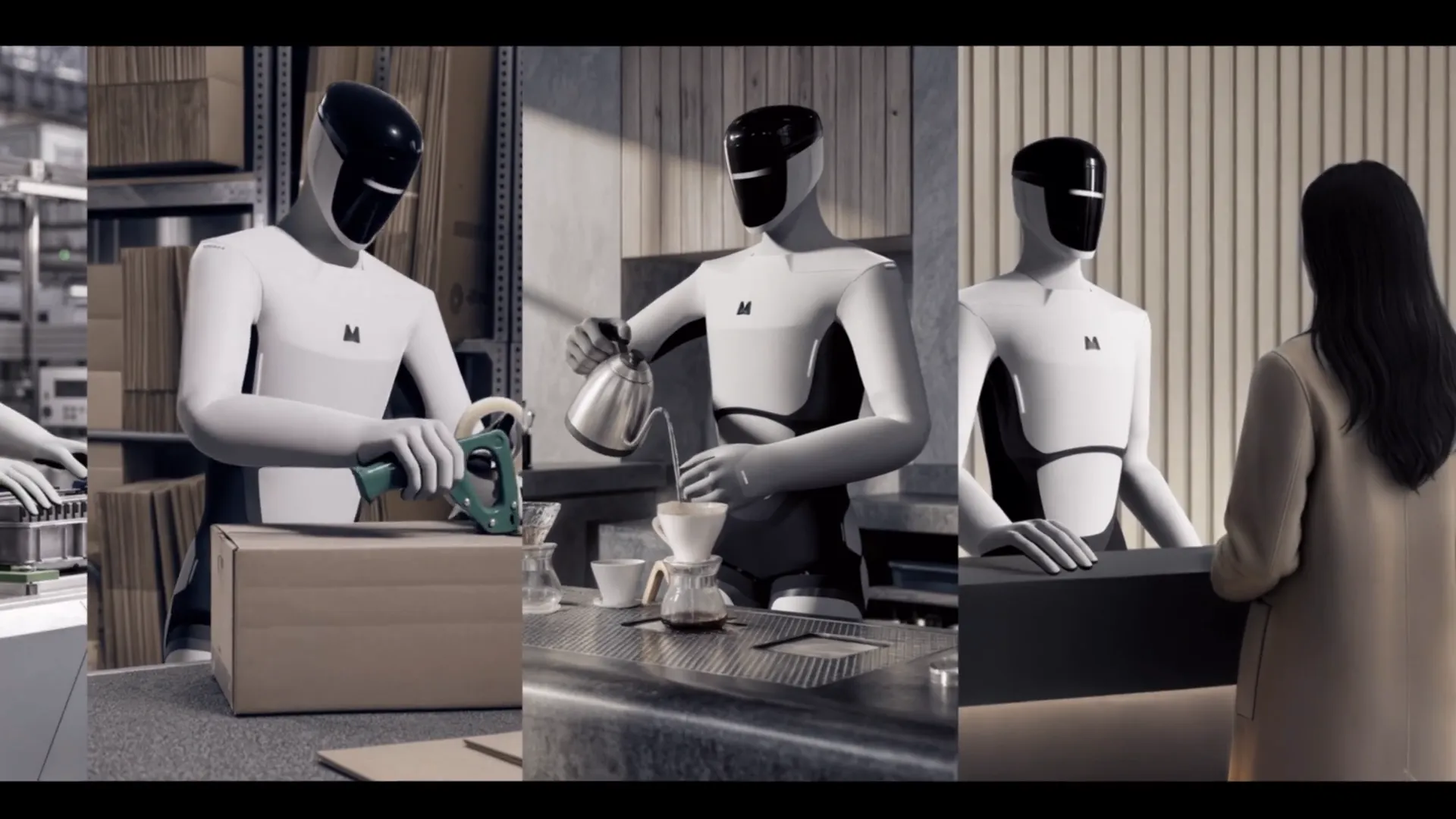
The movement and manipulation systems on MATRIX-3 have also seen substantial evolution. The robot’s 27 DoF dexterous hand mirrors human hand anatomy closely, using lightweight cable-driven actuators that deliver high-speed, high-precision motion. This enables the robot to handle tools, operate delicate instruments, and manage complex manipulation tasks, including grasping fragile or flexible items like fabric. The humanoid’s full-body motion is supported by advanced biomimetic joints and integrated linear actuators that provide stable, agile, and natural gait patterns based on human motion-capture datasets, resulting in walking and navigation that appears fluid and humanlike rather than robotic
What truly sets MATRIX-3 apart is its cognitive core, powered by a proprietary neural network architecture developed by Matrix Super Intelligence. Rather than requiring task-specific training for every new action, the robot demonstrates zero-shot generalization, meaning it can follow natural language instructions and apply fundamental physical reasoning in previously unseen environments without prior data exposure. This allows it to plan complex manipulation strategies, avoid obstacles autonomously, and adapt force and posture in real time during task execution, achievements that signal a significant leap toward practical embodied AI.
Overall, MATRIX-3 exemplifies a new breed of humanoid robots in which biomimetic touch, dexterous manipulation, and generalizable cognitive reasoning are fused to operate safely and effectively alongside people in commercial, logistics, manufacturing, medical, and even home environments.